TSAMTO, July 7. The American company Huntington Ingalls Industries (HII) announced the conclusion of a contract for the supply of four autonomous underwater vehicles " REMUS-300 "(REMUS-Remote Environmental Measuring Units) New Zealand Navy.
This is the first foreign order for the purchase of devices of this version. The delivery should be completed by mid-2022. In addition to the devices themselves, the New Zealand Navy has ordered high-resolution camera modules and additional replaceable battery modules. The sale was realized through the company New Zealand Ocean Technology, which is the representative of HII in New Zealand and the REMUS service center in this country.
The New Zealand Navy already has six Remus-100 autonomous underwater vehicles in service, which have been used for mine warfare and underwater research tasks over the past 14 years. The New Zealand Navy also used the Remus to search for and recover sunken ships, including to determine the wreck of the Princess Ashika ferry in 2009.
As reported by TSAMTO, Remus-300 is an innovative solution in the sector of small autonomous underwater vehicles and was created using the experience of developing and supplying more than 400 vehicles of the family over the past 17 years.
The development of the Remus-300 was completed in April 2021. It can be used to perform mine control tasks, hydrographic research, environmental assessment, search and rescue operations, as well as marine research.
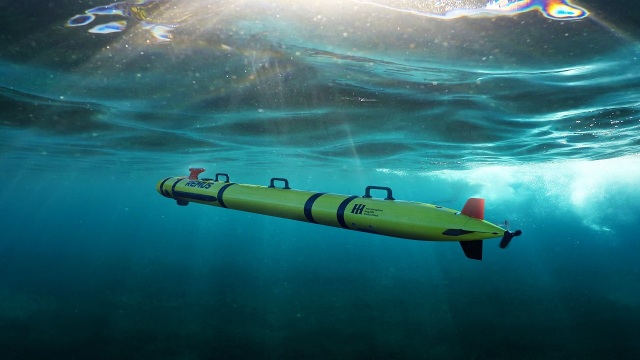
"Remus-300" is a compact autonomous underwater vehicle that is carried and used by a calculation of two people. Its diameter is 190 mm, length-1850-2510 mm, weight-about 36-58 kg (depending on the configuration). The diameter of the Remus-300 is comparable to the small-sized Remus-100, but it provides the possibility of use at a greater depth (up to 305 m).
The device is equipped with field-changeable, environmentally isolated power modules, which, depending on the task, allow the operator to adjust the duration of use up to 10, 20 or 30 hours. Usually, the Remus-300 moves underwater at a speed of 3-4 knots, but it can be increased to 8 knots using high-speed engines. The modular open architecture facilitates the integration of new payloads, sensors and algorithms.
