В последнее время в сети широко обсуждаются опубликованные статьи о создаваемой для ВМФ многоцелевой океанской системе «Статус-6», использующей новые специализированные подводные лодки (ПЛ), несущие роботизированные необитаемые подводные аппараты (НПА). НПА могут выполнять множество боевых задач, но наибольшее беспокойство агрессивного блока НАТО вызывает возможность ответного возмездия в случае ядерной агрессии международного заокеанского жандарма путем нанесения невосполнимого военного и экономического ущерба его прибрежной и равнинной континентальной инфраструктуре. Этот ущерб достигается за счет создания искусственного мегацунами в прибрежной зоне и радиоактивного заражения громадной территории при подрыве термоядерного заряда, доставленного НПА в прибрежную шельфовую зону США. Так как НПА потребуется несколько дней для достижения побережья США, то очевидно, что он является не наступательным средством, а оружием только ответного удара.
В этом варианте НПА является большой, диаметром 1,6 м (по некоторым данным - до 2,5 м) суперторпедой, несущейся после запуска со скоростью хода, по разным данным, от 93 до 185 км/час (от 50 до 100 узл.) на глубине 1 км. Атомный двигатель обеспечит дальность доставки боеприпаса до 10000 км. Оценочная стоимость суперторпеды на 2 порядка ниже стоимости изготовления ПЛА или авианосца НАТО.
В этой статье рассматриваются вопросы гидроакустической (ГА) скрытности суперторпеды для следующих двух вариантов (модификаций) ее реализации:
- Высокоскоростная (до 100 узл.) глубоководная (1 км), почти мгновенно разгоняющаяся суперторпеда, недосягаемая для антиторпед НАТО.
- Суперторпеда, как обычная, но необитаемая, подлодка-малютка, медленно разгоняющаяся до установившейся скорости хода около 20 узл. (возможно – до 50 узл.) и идущая на глубине около 50 … 100 м, уязвимая для торпед НАТО, но имеющая повышенную гидроакустическую скрытность.
Наверное, целесообразно запускать одновременно две группы суперторпед этих двух модификаций или предусмотреть возможность перехода режима движения модификации 1 (при дальнем переходе в необъятном Тихом или Атлантическом океане, где вероятность их обнаружения минимальна) на режим движения модификации 2 при приближении к противолодочным рубежам НАТО (вблизи побережий союзников США – Норвегии, Великобритании, Японии) или к шельфовой зоне побережья США (где усилена их противолодочная оборона).
В обоих вариантах суперторпед для снижения уровня шумоизлучения целесообразно использовать современные ядерные реакторы на быстрых нейтронах с жидкометаллическим теплоносителем (на свинцово-висмутовой смеси), не имеющие механики электромагнитного насоса циркуляции и обеспечивающие безредукторную работу с турбиной.
Отсутствие систем освещения подводной обстановки (СОПО) на всю глубину операционных зон флотов и по всему периметру морских границ РФ не раз отмечалось в размещенных в сети статьях, в том числе и в нашей, опубликованной на сайте ВПК.name статье «Есть ли в России Современное гидроакустическое вооружение?» (части 1 … 7). В ней мы отмечали удручающе малые дистанции обнаружения малошумных ПЛ даже современными ГА средствами, а также то, что вряд ли проблемы надежной СОПО решены в США. Только для дилетантов можно писать о чудесных громадных дистанциях ГА обнаружения современных подводных целей с помощью бортовых (размещенных на ПЛ) ГА станций (ГАС) и комплексов (ГАК), о том, что «потолок американских лодок «Огайо» и «Вирджиния» - 230 км». Здесь повторимся: по какой цели, с какой приведенной шумностью, в каких гидролого-акустических условиях, хотя бы, при каком волнении поверхности моря в баллах и наличии какого мешающего надводного судоходства? Гидроакустика – не радиолокация. В море условия распространения звука могут так изменяться (как в кастрюле с перемешивающейся нагревающейся водой), что звуковые лучи при распространении в водной среде отклоняются либо в дно (с соответствующим поглощением значительной доли звуковой энергии и лишь частичным отражением звука), либо – к взволнованной водной поверхности (где рассеивается значительная доля звуковой энергии и опять же лишь часть ее отражается опять в воду). Расположенные на низких широтах прилегающие к США тихоокеанские и атлантические акватории хорошо прогреваются солнцем. Это приводит к весьма неблагоприятным гидрологическим условиям ГА обнаружения подводных целей, значительной изменчивости температуры, солености (рисунок 1), плотности морской воды, приводящей к соответствующей изменчивости скорости распространения звука. Здесь много часто чередующихся по глубине и солености встречных течений, например, стремящихся к северу теплых потоков Гольфстрима и идущих на юг холодных течений, образующихся при таянии пресных северных ледников. При этом очень часто наблюдаются гидрологии типа 4 с двумя и более количеством слоев «скачка» скорости звука (изменения знака градиента кривой вертикального разреза скорости звука ВРСЗ).
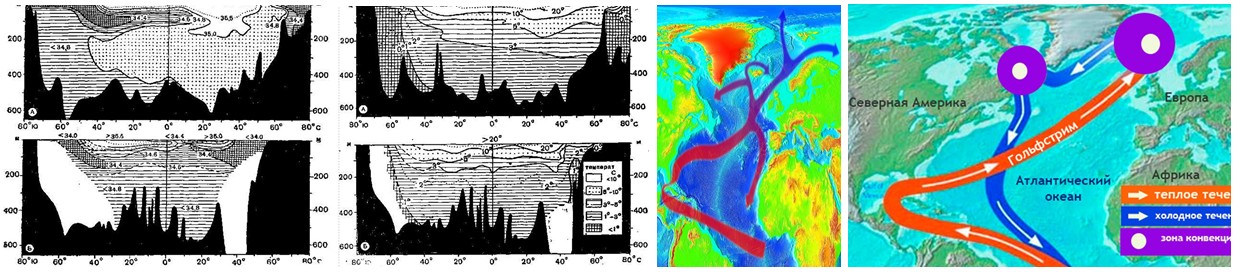 |
| Рисунок 1. Слева направо: Распределение меридиональных разрезов по температуре морской воды (вверху для Атлантики, внизу – для Тихого океана); Распределение меридиональных разрезов по солености (вверху – для Атлантики, внизу – для Тихого океана); Гольфстрим; Направление теплых и холодных течений в Атлантике |
| Источник: ЗАО «НПП «Союз» |
Так как давление возрастает с увеличением глубины, то, соответственно, скорость распространения звука, начиная с определенных глубин, также начинает возрастать и звуковые лучи, при распространении звука в глубоководных районах, отклоняются кверху, а не затухают в донном грунте. Поэтому, по-нашему мнению, предлагаемая большая глубина хода суперторпеды неоптимальна с точки зрения ее акустической скрытности. Суперторпеду, несущуюся на глубине 1 км, намного легче обнаружить при помощи также достаточно заглубленных, но менее 1 км, антенн, чем если бы она двигалась на глубинах типового (обычно порядка 50 … 100 м) скрытного движения подводных лодок вблизи слоя «скачка» скорости звука при гидрологиях типов 2, 3, 4 (здесь мы сошлемся на рисунок 21 статьи «Есть ли в России Современное гидроакустическое вооружение?»). В зависимости от предполагаемого расположения по глубине антенн ГАС вероятного противника командир ПЛ выбирает глубину хода своего подводного корабля по другую сторону слоя «скачка». При наличии гидрологии 4-го типа, с учетом априорно неизвестного расположения антенн ГАС вероятного противника, наиболее оптимальной глубине хода скрывающегося подводного объекта (в нашем случае – суперторпеды) соответствуют глубины между двумя слоями «скачка». А такая гидрология – типовая для вод у побережий США и в районах противолодочных рубежей НАТО вблизи Великобритании и Норвегии, где также сильно влияние Гольфстрима. При расположении суперторпеды и антенны ГА средства ВМС США по глубине на противоположных сторонах относительно слоя «скачка» звуковые лучи шумоизлучения суперторпеды фактически не попадут на антенну. Соответственно, дистанции ГА обнаружения слабошумящих целей могут изменяться в десятки, сотни, иногда и в тысячи раз относительно потенциальных «расчетных» и, конечно, не в лучшую для ГАС НАТО сторону. Поэтому вероятность «пропуска» цели соответствующей ГАС (ГАК) США (или их союзников по НАТО на противолодочных рубежах) достаточно большая.
Не так уж далеко от побережий США располагаются многочисленные трассы надводного судоходства, мешающего ГА обнаружению суперторпеды. Там носятся с большой скоростью и создающие подобные помехи моторные яхты богатых американцев. Пентагон не будет предупреждать их о начале замышляемого им ядерного залпа по нашей стране. Поэтому они будут носиться у океанских побережий США и в начальный период агрессии НАТО, и в момент нашего ответного удара, в том числе и суперторпедами. Из нашего многолетнего опыта работы на своей аппаратуре «Дельта», надводное судоходство создает основные проблемы не только обнаружению подводных целей, но и, особенно, их классификации».
Многочисленным критикам системы «Статус-6», уверяющим, что суперторпеды будут легко обнаружены и уничтожены следует учесть следующее: во-первых, мало смысла имеют дистанции обнаружения целей лишь в отдельные короткие (максимум несколько минут) интервалы времени с последующей потерей «контакта» (типовое «обнаружение» даже современными ГАС и ГАК дальних целей или близких, но малошумящих современных ПЛ); во-вторых, не имеет смысла говорить о дистанции обнаружения цели без ее классификации (хотя бы простейшей начальной дихотомической «надводная / подводная»). За 2-3 года «чистого» (без учета отдыха и сна) времени работы операторами на своей ГА аппаратуре «Дельта» в непосредственной близости с лучшей стационарной и бортовой (на ПЛ) ГА аппаратурой головного в стране разработчика ГАС и ГАК концерна (ранее ЛНПО) «Океанприбор» мы ни разу не наблюдали срабатывания трактов аппаратной классификации концерна. Во всех случаях они по любой малошумной цели выдавали равновероятно и хаотично признаки «ПЛ» или «НК», то есть не работали. Способности операторов-гидроакустиков классифицировать способом второй мировой войны «на слух» в режиме автосопровождения одной выбранной уже обнаруженной не новейшей ПЛ-цели на дистанции порядка до 1 мили – не в счет, хотя в благоприятных условиях, при нахождении антенны и цели по глубине на оси подводного звукового канала, дистанции такого классификационного обнаружения в среднем могут увеличиться в несколько раз. О классификации аппаратурой действующего состава ВМФ малошумнейших атомных ПЛ (ПЛА) с водометным движителем типа «Вирджинии» и нашего «Борея» вообще речь не идет; в конце 2009г. при прохождении «Борея» прямо над нашей ПЛАРБ «Карелией», выше на 50 м, штатные операторы современного ГАК «МГК-520.6» (с нашей точки зрения, лучшего из разработок «Океанприбора») говорили про шумовой сигнал автоматически обнаруженного и отклассифицированного нашей «Дельтой» «Борея»: «Это не сигнал ПЛ, а слабый шелест волнения поверхности моря». Не думаем, что и в США ситуация с проблемами панорамной (одновременно во всем секторе обзора антенны) аппаратной классификации целей разрешена (об этом судим по характеру маневрирования нескольких, в разные годы обнаруженных и отклассифицированных нашей «Дельтой» «Лос-Анджелесов». Но все критики системы «Статус-6», как сговорившись, обходят вопрос классификационного обнаружения. А кому нужно просто обнаружение без классификации? Вы же не будете уничтожать обнаруженную морскую цель, не зная, подводная она или надводная, своя или чужая, является ли она туристской скоростной моторной яхтой или суперопасной суперторпедой. А необходимо не просто классифицировать типовую, известную на типовых испытаниях аппаратуры цель, чаще всего при заранее известной согласованной схеме маневрирования цели и корабля-носителя ГАК, а в реальных боевых условиях работы «вслепую» осуществлять абсолютно уверенное и достоверное классификационное обнаружение неизвестной цели, неизвестно когда и с какого пеленга приближающейся к неизвестно какому месту шельфовой зоны громадного американского побережья. Классификация должна осуществляться не по одному, выбранному оператором пеленгу в режиме автосопровождения одной из многих уже обнаруженных целей, а одновременно во всем секторе обзора антенны (панорамная классификация). В настоящее время ни один находящийся в эксплуатации ВМФ РФ ГАК не способен осуществлять аппаратную автоматизированную (с участием оператора) и автоматическую панорамную классификацию обнаруженных целей. Ее по-прежнему оператор осуществляет на слух, в основном, подсчитывая число оборотов в минуту гребного вала цели по характерным модуляционным всплескам уровня шума (вально-лопастная амплитудная модуляция широкополосного шума).
Длина каждого из тихоокеанского и атлантического побережий США не менее 2000 км. Ширина шельфовой мелководной зоны порядка 250 км у атлантической береговой линии США и порядка 100 км у тихоокеанской. Имеющееся в ВМС США количество патрулирующих у своего побережья 14 ПЛАРБ «Огайо» (ПЛА с баллистическими ракетами) и рассредоточенных по Мировому океану 44-х многоцелевых ПЛА «Лос-Анджелес», 3-х ПЛА «Си-Вулф» и 11 ПЛА «Вирджиния» никогда не обеспечит достаточное ГА освещение подводной обстановки в этой шельфовой зоне (вследствие реальной малой достижимой ГАС и ГАК дистанции классификационного обнаружения морских целей со 100% вероятностью), даже если все ПЛА прекратят боевое дежурство в остальной акватории мирового океана.
Система SOSUS использует скомплексированные одиночные датчики и линейные, уложенные на плоское дно или на подводные склоны нитки датчиков. Говорить об эффективности (однозначности пеленгования и хорошей помехоустойчивости, то есть достаточного соотношения выходных уровней сигнала цели и помехи) таких антенн по сравнению с планарными, применяемыми на ПЛ (особенно с повышенной, относительно бортовых антенн ПЛ США, апертурой носовых антенн отечественных ПЛА), не приходится.
Больше вероятность обнаружения нашей суперторпеды оперативно выставляемыми позиционными сетецентрическими буевыми системами ВМС, применяющими и пассивный, и активный режим. Но там возможности (по дистанции классификационного обнаружения) для каждой отдельной буевой станции существенно ниже, чем для бортового ГАК ПЛА. Да и вряд ли даже богатые США способны закрыть такими сетецентрическими системами все свои морские шельфы у атлантического и тихоокеанского побережий.
И если хотя бы одна из суперторпед с термоядерным зарядом сюда дойдет, то даже для ситуации с ее последующим обнаружением и правильной классификацией со 100%-й вероятностью и, только в этом случае, принятием мер по ее поражению антиторпедой или иными средствами, нашим специалистам технически не очень сложно обеспечить гарантированный взрыв термоядерного боезапаса в момент повреждении корпуса суперторпеды. Цель все равно уже достигнута. А на необъятных просторах всего Тихого и всего Атлантического океана искать, повторимся, неизвестно когда, неизвестно откуда и по какому курсу запущенные суперторпеды – все равно, что искать иголки в стоге сена. И даже, если какие-то из нескольких запущенных к США суперторпед будут обнаружены (как говорит доктор военных наук Константин Сивков, с вероятностью «от 5–8 до 15 процентов») на противолодочных рубежах, это все равно существенно не повлияет на эффективность залпа в целом, ведь даже несколько оставшихся суперторпед устроят на шельфе США фатальный цунами, который смоет все на громадной низменной части территории США. Срабатывание же боевой части суперторпеды при ее обнаружении и уничтожении на противолодочных рубежах также повлечет за собой катастрофические последствия не для наших союзников, а для союзников-сателлитов США по военной агрессии против нашей страны, а это - Норвегия, Великобритания, Япония, расположенные вблизи этих противолодочных рубежей агрессивного блока НАТО.
Размещенные в сети комментарии критиков системы «Статус-6» в основном относятся к одному из ее элементов – суперторпеде. В некоторых из них содержатся изумительно поверхностные, легкомысленные выражения типа: «При 50 узлах и 50 тоннах веса ее будет слышать пол-Атлантики. Даже без дискрет. Это вообще не обсуждается» (Викторович). К сожалению, наш хороший знакомый и уважаемый нами за компетентность во многих вопросах гидроакустики Максим Климов (mina) в своих комментариях к статьям сети также согласился с этим утверждением Викторовича и утверждает: «С поражением "ядреной дуры" с ТТХ раскрытыми в СМИ проблем нет. С обнаружением (заблаговременным, естественно) - то же… ПОВТОРЯЮ: Будет слышать пол-Атлантики… Изделие … уже сегодня с значительной вероятностью может поражаться антиторпедой "Трипвайр" ВМС США… задача абсолютно решаемая на современном техническом уровне (причем основное "железо" вполне серийное)… с учетом моего знания как "штатовских вопросов", так и торпедного дела и акустики - "все уже есть еще вчера" (или "почти есть"…». На комментарий SteSus «Ну, предположим, на расстоянии 50 км это так. Но океан-то пошире будет, на каждые 50 км корабль и даже микрофон не поставишь» mina отвечает: «много больше» (про 50 км) «и достаточно простыми и массовыми гидроакустическими системами… никаких проблем, это было по силам системам даже 80х годов».
Максим явно переоценивает возможности систем активной гидролокации и во многих своих статьях и комментариях преувеличивал их возможности обнаружения современных подводных целей в необъятных морских просторах, оставив без убедительных комментариев приводимые нами данные (статья в ВПК.name «Есть ли в России современное гидроакустическое вооружение?») по реальным результатам многоразовой активной локации современной ПЛ-цели типа «Зверь» современными штатными бортовыми средствами отечественных ПЛ. Мы видели данные о «возможностях обнаружения» отечественными активными ГАС с буксируемыми антеннами, в которых на реальный фон морской обстановки накладывали отображение «ПЛ-цели» включенного имитатора, но не видели ни одного фото с экрана видемонитора ГАС или ГАК, подтверждающего уверенное трассовое сопровождение подводной цели в активном режиме. Те, кто работал на нашем стационарном активно-пассивном ГАК «Днестр», так говорили нам о его способностях обнаружения ПЛ: «Ни черта не видел». По тем же причинам был исключен активный режим в американской глобальной системе «SOSUS». Вполне допускаем, что Максим, имевший значительно больший, по сравнению с нами, опыт работы с активными гидролокаторами по современным ПЛ с современным эффективно поглощающим зондирующий сигнал специализированным покрытием корпуса (уменьшающим так называемую «эффективную площадь рассеивания цели» до 1 и менее кв. м) прав по поводу эффективности активной локации. Но он, приведя нам пример уверенного активного обнаружения современной «Ладоги», не сказал, что это наверняка происходило в мелководном Балтийском море (почти идеальном акустическом волноводе-рупоре с каменистым малопоглощающим звук дном; этот рупор обеспечивает практически цилиндрический закон медленного затухания энергии звука). Наверное, и волнение поверхности было небольшим. И главное, нам известно множество случаев «чудесных» обнаружений (правда без классификации) на испытаниях по известным заранее выделенным целям и по заранее известной схеме маневрирования цели и носителя ГАК, но затем, эти ГА средства при реальной боевой работе «вслепую» в условиях полной априорной неопределенности, будет ли, когда и откуда появится цель, оказывались беспомощными при действительном приближении неизвестной цели, особенно в мелководном Баренцевом море с громадным затуханием звука в толстом донном иле. Малоубедительно Максим молчит и о возможностях классификации целей при помощи активных гидролокаторов, да и по обнаружению хотелось бы видеть конкретные подтверждающие фотодокументы с указанием конкретных гидролого-акустических и прочих условий обнаружения. Его утверждение «у них с классификацией много лучше, чем у нас» желательно подкрепить конкретными данными. Мы лично, повторимся, судя по неоднократному, наблюдаемому нами на экранах «Дельт» характеру маневрирования обнаруженных и отклассифицированных «Лос-Анджелесов», сомневаемся в его правильности. Максим утверждает: «Я, мягко говоря "немного в курсе" возможностей системы ПЛВ вероятного противника на ТВД». Интересно, откуда сведения о возможностях? Из их прессы (американцы любят бахвалиться победами во второй мировой или прогулками на Луне) или из разговоров отдельных офицеров? Таких разговоров наших офицеров о многочисленных обнаружениях американцев отечественными ГАС и ГАК мы наслушались множество. Только вот на наших глазах (повторимся, за многолетнее в сумме «чистое» время работы на разных объектах в качестве операторов своей аппаратуры в непосредственной близости рядом с лучшей аппаратурой концерна «Океанприбор» в Тихом океане, Черном, Белом, Баренцевом, Норвежском и Гренландском морях) и стационарные, и бортовые ГАС и ГАК «Морфизприбора» по нашим ПЛ-целям показывали лишь эпизодические (чаще всего кратковременные от нескольких до десятков минут) обнаруженческие контакты на ограниченных (порядка 1 км … несколько км обнаружения, редко порядка до 10 км - дальнейшее сопровождение цели). При этом ни о какой аппаратной классификации целей речь не шла (только на слух в режиме автосопровождения выбранной цели). По иностранным ПЛ (при достаточно большом общем количестве зафиксированных нашей аппаратурой «Дельтой» эпизодов) результаты были бледнее на порядок (и тоже без аппаратной классификации). Задача же охраны побережья от суперторпеды состоит не в эпизодическом неуверенном близком обнаружении, а в дальнем панорамном классификационном обнаружении с вероятностью, близкой к 100% при любых погодных условиях.
Применительно к суперторпеде, Максим пояснял, что он имеет ввиду пассивное шумопеленгование. Ну, здесь мы, как разработчики соответствующей аппаратуры панорамного классификационного автоматизированного и автоматического ГА обнаружения и целеуказания с учетом многолетнего опыта работы операторами «Дельт» рядом с ГАС и ГАК «Океанприбора» и с учетом вышесказанного в этой статье о гидролого-акустических условиях в необъятной охраняемой США и НАТО морской акватории, можем уверенно повторить тезис об «иголке в стоге сена»: никакой слышимости на «пол-Атлантики» или хотя бы всего лишь на «много больше 50 км» «с значительной вероятностью». Высокодостоверного и, обязательно, классификационного обнаружения всех суперторпед (повторим, пущенных неизвестно когда, неизвестно откуда и каким курсом) не достичь любой современной ГА аппаратурой, не то, что «достаточно простыми и массовыми гидроакустическими системами» 80-х годов». И хотя мало сомнений в том, что районы базирования кораблей, доки и т.п. в США прикрыты хорошо, но вряд ли морская граница вдоль всего тихоокеанского и атлантического побережий защищена "более чем".
Мы нисколько не сомневаемся в высокой компетенции и квалификации Максима и, возможно, Викторовича, чтобы не доверять их знаниям тонких особенностей и технических характеристик торпед, по которым мы дилетанты. Нам лишь однажды представилась возможность обнаруживать и получить классификационные параметры (в том числе вально-лопастной спектр движителя) отечественной быстронесущейся торпеды (неизвестного нам типа), поразившей цель на расстоянии 10 км. Она настолько сильно и специфично шумела при слуховом прослушивании и ее высокооборотный винт давал такой мощный ряд (частокол) дискрет вально-лопастного спектра на частотах 21 … 1000 и более Гц на всем протяжении ее хода до цели, что нам понятна уверенность Максима и Викторовича в достоверном обнаружении суперторпеды. Видимо поэтому нам Максим отвечал: «По шумности лодок "на ходу" - к уважаемым Лексиным - коротко и без подробностей - вы не правы (хотя бы потому что в основу обнаружения "ваших подходов" были положены иные принципы, нежели те, которые "лезут" при увеличении хода и шумности)… "дура" и АПЛ - принципиально разные объекты в плане скрытности». Непонятно, какие такие «иные принципы» «положены в основу обнаружения» наших «подходов». Если Максим имеет ввиду примененные нами методы классификационного обнаружения ПЛ по их пассивному сверхнизкочастотному (СНЧ) высвечиванию морскими помеховыми шумами, то ведь в нашей аппаратуре заложено и множество других эффективных алгоритмов панорамного классификационного обнаружения методами классического шумопеленгования. Причем, во многих из этих алгоритмов, мы широко использовали адаптивный автоматический спектральный анализ и широкополосной несущей, и ее амплитудно модулированной огибающей в различных поддиапазонах частот огибающей, позволяющий относительно обычного пеленгования широкополосного сигнала существенно повышать дальность обнаружения и ПЛ, и торпед, и при их малой скорости хода, и при любой большой. Максим в своих статьях сообщал: «Сегодня в зарубежных ГАС, наряду с режимом шумопеленгования в широкой полосе частот основным режимом поиска является обнаружение характерных дискретных составляющих (ДС), снижение которых, с учетом малого диаметра корпусов и большой мощности энергосиловой установки (ЭСУ) торпед представляет значительную сложность». В наших «Дельтах» соответствующий тракт реализован не в одноканальном варианте, а осуществляет двумерную (одновременно для всего сектора обзора антенны) спектральную обработку для визуального анализа оператором, также осуществляет автоматический адаптивный двумерный спектральный анализ с выдачей данных (при взаимодействии с двумерным параметрическим автоклассификатором) о числе оборотов в мин. гребных валов, числе лопастей винтовых движителей и скоростей хода целей (последнее – при условии достаточной измеряемой апостприорной вероятности правильной классификации цели).
Конечно, Максим частично прав, утверждая: «скоростной малоразмерный (а значит очень шумный) объект на большой глубине (с заведомо "обжатыми" давлением средствами акустической защиты) обнаруживается и "ведется" элементарно». Многие эксперты избыточно преуменьшают возможности ГА обнаружения суперторпеды с высокооборотными винтовыми движителями, ссылаясь на смещенные в высокочастотную область («выше 10 кГц») энергетически важные спектральные компоненты шумоизлучения типовых торпед. А как же тогда их уверенно не только обнаруживают, но и классифицируют (на слух) на достаточно больших (десятки км) дистанциях операторы ГАК. Это объясняется тем, что оператор обнаруживает и распознает (на слух) торпеды (да и надводные и подводные корабли с существенно менее высокооборотными винтами) не столько по уровню шума широкополосной несущей, сколько благодаря природной психо-физиологической особенности избирательности слуха по отношению к характерным модуляционным всплескам огибающей несущей, из которых наиболее информационны вально-лопастные компоненты, связанные с частотой вращения гребного вала и числом его лопастей. Амплитудная модуляция широкополосного шума происходит вследствие достаточной нелинейности относительно вязкой водной среды (приводящей к появлению не только комбинационных суммарных высокочастотных обергармоник, но и разностных низкочастотных субгармоник), неидеальности и неодинаковости формы разных лопастей гребного винта, поочередно, при вращении, оказывающихся на разной глубине с разным давлением. При этом кавитационное схлопывание образующихся на тыльной, относительно направления вращения лопастей, пузырьков имеет разный характер для неодинаковых лепестков, что облегчает классификацию.
Уповая на гарантированное ГА обнаружение суперторпед, Максим и Викторович не учитывают, что существенное повышение шумности цели с повышением скорости ее хода приводит к далеко не пропорциональному повышению дальности ее обнаружения. Вот, например, полученные в результате решения уравнения дальности для бортовых ГАС или ГАК ПЛ с носовой цилиндрической антенной (отечественной с большей апертурой относительно антенн ПЛ США) зависимости потенциальной дистанции неклассификационного шумопеленгования (реальная может быть только меньше вследствие неучтенных конструктивных потерь) малошумных подводных целей типа наших «зверей» (ПЛА пр.971 с 7-лопастным винтом) с приведенной шумностью (на ходу 6 узл.) Рсо=0,03 Па/Корень(Гц) (нижняя таблица рисунка 2) и американской «Вирджинии» (с водометным движителем) с приведенной шумностью (на ходу 6 узл.) Рсо=0,007 Па/Корень(Гц) (верхняя таблица рисунка 2) от скорости хода этих целей, гипотетически увеличенной до 50 узл. Здесь учтены достаточно малые относительно потерь в типовых наблюдаемых нами ГАС и ГАК конструктивные потери ГАС «Дельта-ПМ1» КП=2 дБ в высокочастотном рабочем диапазоне и 0,7 дБ - в низкочастотном, достаточно малый приведенный уровень бортовых помех Рпб=0,0005 Па/Корень(Гц) и небольшой приведенный уровень помех надводного судоходства Рпс=0,001 Па/Корень(Гц); реальный уровень интенсивного мешающего надводного судоходства у побережий США наверняка существенно выше. Расчет производился для двух частотных полутораоктавных рабочих диапазонов (отбирались дистанции, максимально достижимые в любом из них) с достаточно оптимальными значениями эквивалентных рабочих частот. Использована приведенная в вышеупомянутой нашей статье «Есть ли в России современное гидроакустическое вооружение?» зависимость изменения уровня шумоизлучения ПЛА-цели от изменения ее скорости хода. Рассмотрены две упоминаемые там же типовые для обнаружения в малоширотных районах Атлантики и Тихого океана гидрологические модели распространения звука ГлМ-Зон (для случая движения ПЛА-цели или суперторпеды на глубинах 50 … 100 м в целях скрытности за слоем «скачка» скорости звука) и ГлМ-ППК (для случая движения ПЛА-цели или суперторпеды на больших глубинах с положительным градиентом ВРСЗ). Следует учитывать, что если в условиях ГлМ-ППК обнаружение и сопровождение цели в пределах до максимальной дистанции практически непрерывное (с высокой вероятностью правильного обнаружения Рпо), то в условиях ГлМ-Зон дистанции порядка нескольких десятков км не означают обнаружения и сопровождения целей на всем промежутке меньших дистанций. При зональном канале распространении звука уверенное обнаружение приближающейся или удаляющейся цели осуществляется лишь эпизодически и кратковременно либо в круге ближней зоны акустической освещенности (БЗАО), либо в достаточно узких кольцах дальних зон акустической освещенности (ДЗАО1, ДЗАО2 и т.д.).
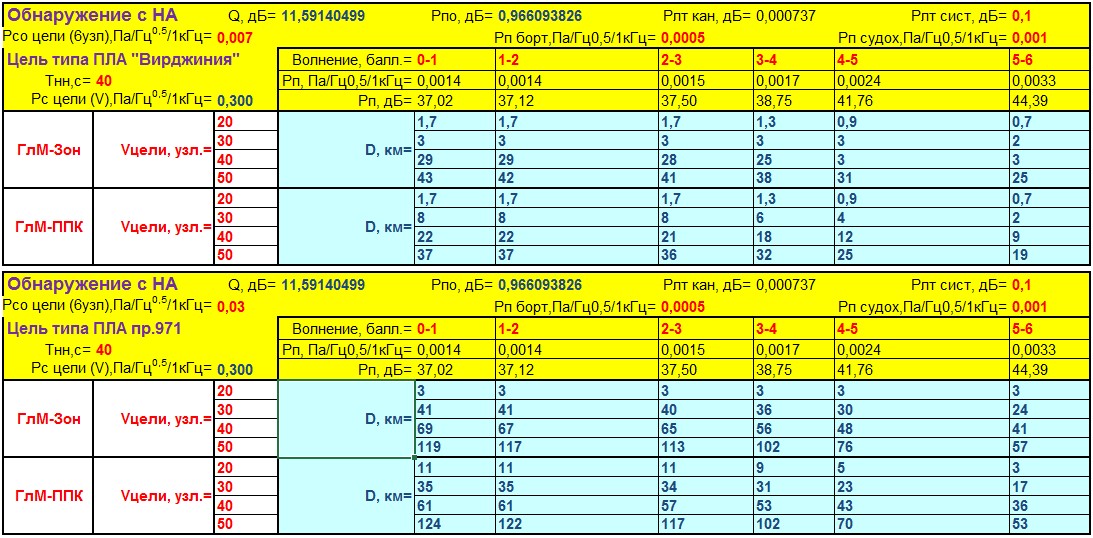 |
| Рисунок 2. Расчетные дистанции неклассификационного шумопеленгования подводных целей типа ПЛА с водометным движителем («Вирджиния») и с классическим 7-лопастным винтом (пр.971) в зависимости от их скорости хода (гипотетически – до 50 узл.) при использовании бортовой носовой цилиндрической антенны (НА) |
| Источник: ЗАО «НПП «Союз» |
В таблицах рисунка 3 представлены аналогичные зависимости при использовании вместо носовой цилиндрической антенны гибкой протяженной буксируемой антенны (ГПБА), работающей на пониженных частотах. Вместо бортовых помех здесь учтены гидродинамические шумы обтекания ГПБА с приведенным уровнем помех Рп гд=0,001 Па/Корень(Гц). Длина рабочей (с датчиками) части ГПБА равна 60 м (использование гибкой антенны большей длины бесполезно вследствие большого ее отклонения от прямолинейности и от соосности с продольной осью ПЛ-носителя при буксировании и приводит лишь к удорожанию ГПБА).
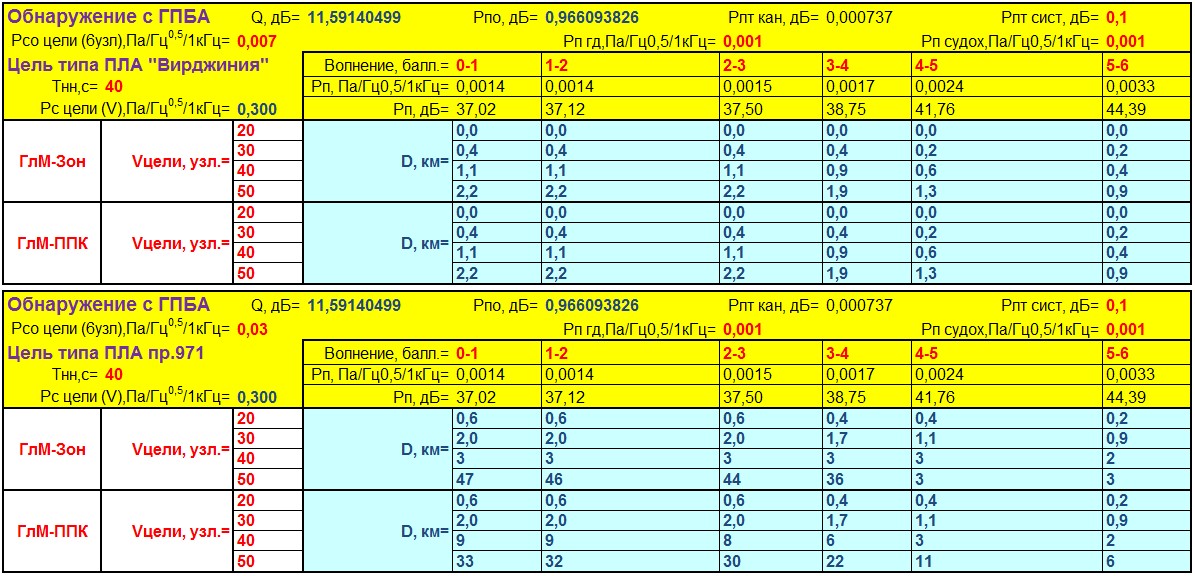 |
| Рисунок 3. Расчетные дистанции неклассификационного шумопеленгования подводных целей типа ПЛА с водометным движителем («Вирджиния») и с классическим 7-лопастным винтом (пр.971) в зависимости от их скорости хода (гипотетически – до 50 узл.) при использовании гибкой протяженной буксируемой антенны (ГПБА) |
| Источник: ЗАО «НПП «Союз» |
Видно, что потенциальные (реальные, повторим, могут быть только меньше) дистанции обнаружения ПЛА не такие уж и большие даже при разгоне рассмотренных громадных целей до 50 узлов. По суперторпеде с меньшим водоизмещением эти дистанции существенно сократятся.
Из рассмотрения данных таблиц очевидно, что при выборе момента старта суперторпед в штормовую погоду с большим ветровым волнением поверхности моря их потенциальное обнаружение существенно осложняется. Реальное обнаружение при шторме может оказаться с еще более худшими результатами. На наших глазах лучший ГАК концерна «Океанприбор» («МГК-520.6») при шторме 5 … 7 баллов был практически «слепой» (резко возрастали конструктивные потери вследствие недостаточного динамического диапазона допустимого изменения уровней обрабатываемых сигналов).
Ссылаясь на достаточно уверенное обнаружение операторами типовых торпед, критики системы «Статус-6» не учитывают то, что оператор прослушивает мощный шум торпеды - этой действительно «ревущей коровы», находясь на корабле, к которому она и мчится. А где разместить операторов в необъятных океанских акваториях при защите США от суперторпед? Ведь число операторов (и количество ГАС и ГАК) явно недостаточно.
Нельзя к специализированной, с принятием мер по обесшумливанию, современной суперторпеде подходить с критериями старых классических торпед с высокооборотными винтовыми движителями. Классическая торпеда должна как можно быстрее достигнуть цель, для чего в ней применяется мощный высокооборотный движитель, позволяющий после старта за секунды достичь установившуюся скорость хода. Это и приводит к большому частоколу мощных медленно спадающих с частотой спектральных дискрет шумоизлучения, что и является причиной устойчивого представления о легком классификационном (на слух) обнаружении и устойчивом автосопровождении торпеды (малоразмерной цели для оператора-гидроакустика) даже на относительно больших (десятки км) дистанциях. Но для суперторпед системы «Статус-6» не требуется почти мгновенный разгон и, соответственно, такой мощный, шумящий движитель. Время ее выхода на режим установившейся скорости ничем не ограничено и может достигать нескольких часов. Например, по сравнению с американской торпедой МК-48 (водоизмещение 1,2 т) для суперторпеды с большим на два порядка водоизмещением, но с ускорением разгона на 4 порядка меньшим потребуется на 4 порядка менее мощный, и соответственно менее шумный движитель. Такую суперторпеду будет не так легко обнаружить даже при больших скоростях ее хода, возможно даже и при скоростях ее хода порядка 50 узл.
Возможности шумопеленгования резко снижаются с уменьшением размеров (подводного водоизмещения) цели. И если еще для суперторпеды снизить скорость до величин порядка 20 узлов, да еще применить для нее водометный движитель, то задача ее шумопеленгования в огромной акватории, как верно отметил в размещенном в сети комментарии Андрей Бахарев, - «посложнее, чем найти иголку в стоге сена». Известно, что из двух погруженных движущихся с одинаковой скоростью хода ПЛ в среднем меньше шумит та, у которой меньше габариты. Поэтому-то, например, дизельная «Варшавянка (пр.877, подводное водоизмещение около 3000 т) с относительно высокой скоростью оборотов гребного винта (с большим кавитационным эффектом схлопывания пузырьков на лопастях винта, приводящим к турбулентным шумам, самым демаскирующим современную ПЛ относительно шумов обтекания, вибрационных от плохо амортизированных механизмов и прочих) более малошумная, чем наши тоже малошумные «Звери» (ПЛА пр.971) с подводным водоизмещением около 13000 т. И в том, и в другом проектах приняты конструктивные меры по снижению вибраций механизмов и агрегатов, по улучшению обтекаемости и пр. Поэтому, логично предположить, что можно создать современную суперторпеду (несущую термоядерную боевую часть) с подводным водоизмещением порядка 100 т, которая будет при одинаковых скоростях хода иметь шумность еще меньшую, чем «Варшавянка». Возможно, в ней будет целесообразен водометный движитель, аналогичный движителям американской ПЛА «Вирджинии», нашей ПЛА «Борей» и нашей малошумной торпеды с выдвижными рулями «Физик-1» (рисунок 4), в которой водометный движитель соединен с двигателем без редуктора. Водометный движитель совершенно не дает дискрет спектра шумоизлучения (по «Физику-1» мы не работали, но по «Борею» проводили спектральный анализ) и практически исключает возможность уверенной классификации суперторпеды, без которой, повторяем снова и снова, обнаружение бессмысленно. Если малошумный 7-лопастный винт ПЛ со скошенными, саблевидными лопастями дополнительно снижает шумность ПЛ на 10 дБ, то 12-лопастный (5+7) водометный движитель - на 20…3О дБ, а 16-лопастный (7+9) - на 20…40 дБ. Водометный движитель с активной гибкой направляющей насадкой "Смарт-дакт" для ПЛА типа “Вирджиния” позволяет ей оставаться малошумной на скорости хода до 20 узл. Что говорить о специально сп






