
Until 2024, only four countries managed to land gently on the moon: Russia, the USA, China and India. At the same time, recent attempts of this kind by Roscosmos, the American private company Astrobotic, as well as private Israeli and Japanese players ended in crashes. The Japanese Space Agency became the fifth in the list of those who were able to do this, showing a non-trivially high level of competence.
Smart Lander for Investigating Moon ("Smart lander for exploring the Moon", SLIM) was originally planned to be launched in 2021, but in practice it was possible only on September 6, 2023. Unlike many other moon landing vehicles, it used time-consuming trajectories, so it reached the lunar orbit only on December 25. From January 17, 2024, the device began to slow down gradually, lowering the altitude of the flight over Selena. By the 19th, the lower point of this orbit reached 15 kilometers, after which SLIM began landing on an Earth satellite. At 18.20 Moscow time, he gently landed.
The landing site of the spacecraft is the 13th degree of south latitude of the visible side of the Moon, near the small, 300—meter-high Siori crater, located inside the larger Cyril crater. This sharply distinguishes the mission from last year's Indian one, which landed in the southern polar latitudes of the Moon in order to better study the area where the soil is potentially rich in water.
© YouTube
Shiori's choice is due to the fact that the Japanese mission specifically selected a place where it is safe to land only with exceptionally high landing accuracy. The fact is that SLIM developers consider the possible size of the "landing spot" for their device to be equal to 100 meters. For comparison, the landing of the last of the lunar manned modules of the Apollo missions went into a landing ellipse 15 by five kilometers. Upon landing, the deviation from the estimated lunar landing point was 400 meters — even despite the significant experience gained by the United States of America at that time.
So far, the Chinese have demonstrated the most accurate landing on the Moon: they had a landing spot six by six kilometers. And they were able to deviate from its center by only 89 meters. The Chandrayan-3, which landed last year, had a landing spot of four by 2.5 kilometers, but when landing, the deviation was already 350 meters from the central point.
The accuracy of the landing spot of 100 meters should be achieved by the Japanese device not for the sake of prestige, but because future missions to the Moon are planned in the area of the south Pole, where there are many very difficult landscapes. Huge boulders, slopes, and the like mean that a small error with the accuracy of the landing site can be fatal to the mission. Even landing the device on the slope of Shackleton crater — due to the steepness of its slopes exceeding 30 degrees — can lead to falling on its side, after which normal operation (and survival) It won't work anymore.
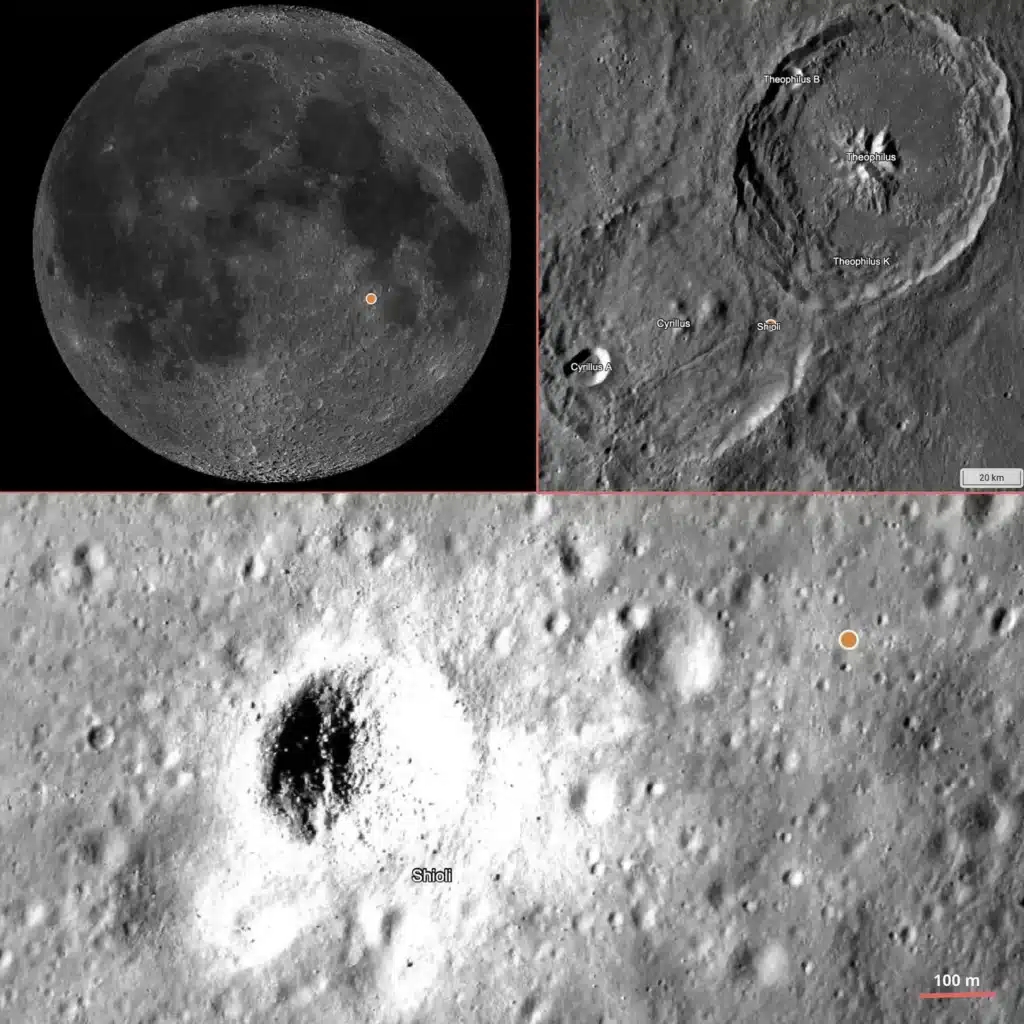 |
| Orange shows the place where SLIM should sit, the scale in the photo is given in the lower right corner. |
| Source: Wikimedia Commons |
To practice landing in such difficult conditions, the Japanese chose an area with an inclination of up to 15 degrees (the slope of the crater) for landing SLIM. This is very risky for a device with a "dry" weight of 120 kilograms. In addition to precision, it requires rather specific landing legs: they are designed to intentionally collapse during landing, and the deformation of these aluminum supports should extinguish some of the impact energy.
In addition, the device uses a unique landing technique, a kind of sideways roll when landing. Without it, it would be difficult for him to ensure the correct orientation of the solar panels in the Sun in landing conditions on a highly inclined surface.
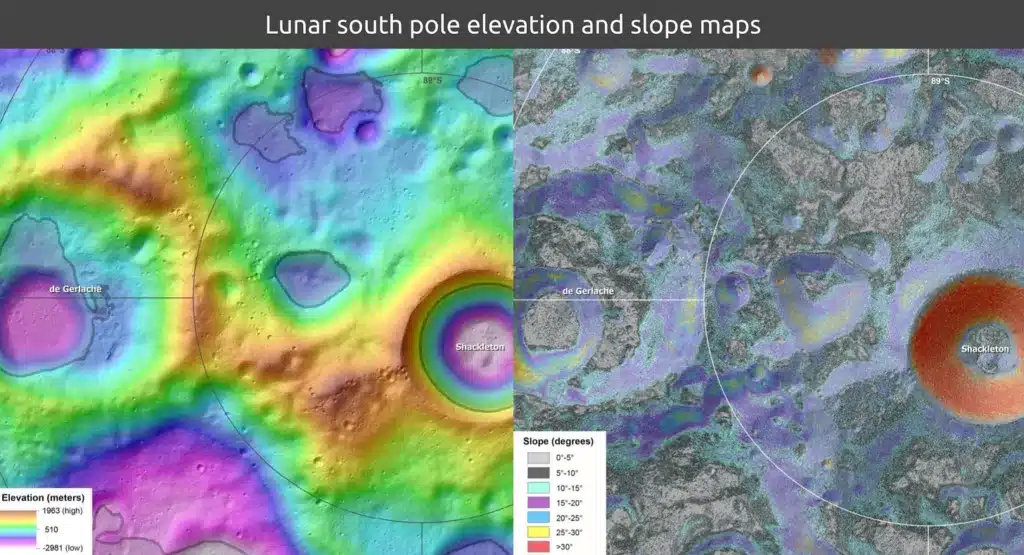 |
| The angles of inclination near the crater Shackleton at the south pole of the Moon. It is clearly seen that even if you ignore the boulders, the angles of the surface here are often very difficult to land. The Japanese Space Agency. |
| Source: Wikimedia Commons |
To ensure high accuracy, the device will refine its specific position during landing using high-resolution cameras. Comparing the data from them with maps of the lunar surface in his memory, he makes adjustments to the operation of the landing engines in real time. This task was extremely difficult, because the performance required for this on-board computer is very high, and an overly productive computer consumes too much energy.
Among the payload of the device are not only devices for analyzing the composition of the lunar soil in the landing area, but also two lunar rovers at once. Moreover, the first of them, Lunar Excursion Vehicle 1, is of a unique design. It would be more accurate to call it a "moon jump", since it must move across the surface of the satellite by jumping. This is an extremely useful technology, because, as Naked Science has already written, standard planetary rovers have exceptionally low cross-country capability. Moreover, this problem is almost impossible to solve on wheeled and even tracked vehicles (the regolith of the Moon and even Mars has too specific properties).
 |
| Lunar Excursion Vehicle 2 weighing 250 grams must change its shape from spherical to like this for movement. It is not known for certain what caused such an unusual technical solution. |
| Source: Wikimedia Commons |
Meanwhile, significant scientific results often require getting into the most rugged terrain — for example, on the steep slopes of craters, where the sun's rays do not reach and where more light elements have been preserved (up to permafrost soils). In principle, wheeled tracked vehicles are not suitable for getting into the open parts of huge lunar caves (lava tubes), but "moon jumps", due to low local gravity, are potentially suitable. Of course, the first moon jump will have a limited instrument load and energy capabilities — it is only required to demonstrate stable movement along the slopes.
The second onboard lunar rover, Lunar Excursion Vehicle 2, is in some ways even more exotic. Its mass is 250 grams, in its original shape it is a ball with a diameter of eight centimeters. Due to the moving parts, the lunar rover is able to change shape and move around the regolith for up to two hours (then the battery charge will run out). The developer of this rather unusual product was a Japanese manufacturer of children's toys.
Upd.: judging by preliminary data, despite the soft landing, the device is unlikely to have a long and productive work. Due to the too complex lunar landing scheme (with a planned sideways roll so as not to fall on the slope), SLIM either turned over or stood at an unplanned large angle to the surface. Because of this, the solar panels could not be oriented to the Sun at the right angle. And without this, the device will soon lose the required battery charge level and fail. For now, he continues to transmit, which is received on Earth, but his battery will not last long in this position. At least the first lunar rover was deployed, but it is unclear whether it will be able to transmit data for a significant amount of time (its own communication system is too low-power to effectively reach the Earth without the mediation of the SLIM base module).
