
Chinese engineers have taught the Unitree G1 humanoid robot to skateboard using the HUSKY algorithm they developed. They used a skateboard physics model and reinforcement learning. The robot can push off with one foot from the ground, like a real skateboarder, gain speed, turn smoothly by tilting the body to the desired angle, and maintain balance during all maneuvers. The preprint of the article is published on the website arXiv.org the project has a page on GitHub.
Teaching a robot to skateboard is a much more difficult task than it might seem at first glance. Unlike the usual walking on a hard floor, the android in this case has to control a mobile dynamically unstable platform with wheels that do not have their own motors. Although robobacks have been able to learn this trick, skateboarding has been difficult for humanoid robots with their high center of gravity until recently. The main problem is that traditional control methods, such as control based on predictive models, tend to simplify the task too much and assume a static surface, whereas a skateboard is mobile, and interaction with it requires subtle consideration of physics.
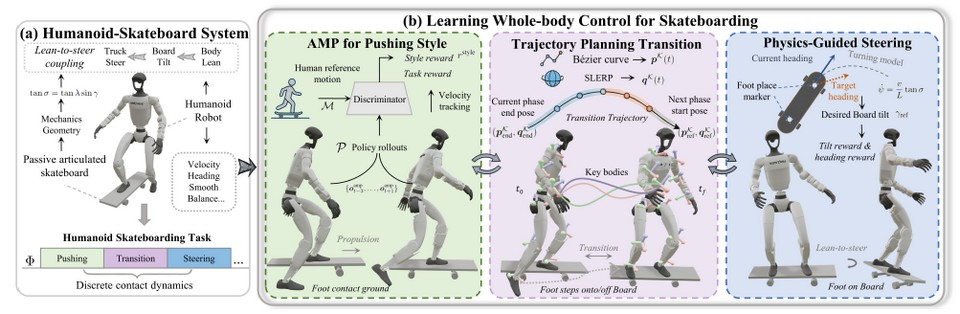
A team of researchers led by Chenjia Bai from the Institute of Artificial Intelligence has introduced a control system called HUSKY (HUmanoid SKateboarding sYstem) that solves this problem. It is based on an approach consisting of three components: pushing off, taxiing, and the transition process, during which the robot transfers its foot, which pushes off the ground, onto the board. Each phase uses its own strategies combined into a common reinforcement learning framework.
For the acceleration phase, in which the robot stands with one foot on the board and the other pushes off the ground, the developers used an imitation of human movements using the Adversarial Motion Priors method, which allows the robot to copy the movements of real skateboarders. The neural network evaluates how similar the robot's movements are to real ones, which makes them more natural and smooth, and helps maintain balance with intermittent contact of one foot with the ground. The taxiing phase, in which both feet are on the board, is based on the physical model of a skateboard with a roll-based rotation system. The model tells the robot the necessary angle of inclination to achieve the desired course. The robot receives a reward for observing this calculated roll, which significantly speeds up training and improves maneuvering accuracy compared to methods without explicit physical prompts. In the transition phase, HUSKY generates smooth Bezier curves for key body points (legs, pelvis) from the current position to the target pose of the next phase. This creates a "corridor" of movements, helping the robot to smoothly transfer weight and accurately place its foot in the right place on the skateboard deck, avoiding sudden jerks and loss of balance.
 |
| The Unitree G1 robot. |
| Source: Jinrui Han et al. / arXiv, 2026 |
For training, the engineers used the Proximal Policy Optimization algorithm with an asymmetric actor-critic scheme in the Isaac Gym simulator. The agent received information about the condition of the robot and skateboard and learned how to maximize the reward, which included the accuracy of following a given speed and direction, as well as the smoothness of movements. To transfer skills from simulation to reality, the authors measured the physical parameters of the suspensions of real skateboards and determined their response to tilt and vibration attenuation. The engineers used the data obtained to set up the simulator, which minimized the gap between virtual and real physics (sim-to-real gap). In addition, randomization of environmental parameters such as friction and mass was used during training to make the robot's behavior more resistant to external disturbances.
In tests on a real Unitree G1 robot, the HUSKY system has demonstrated good results. The robot successfully accelerated, jumped on the board, performed turns and braked, maintaining its balance even with external shocks. He was able to ride skateboards with different suspension stiffness, adapting to their features. Comparison with the basic methods has shown that the proposed approach provides higher stability, control accuracy and naturalness of movements.
At the moment, the robot uses a limited field of view of the built-in cameras, which does not allow it to reliably track the position of the skateboard and the interaction of the wheels with the surface. Therefore, in the future, the developers plan to introduce an improved vision system so that the robot can adjust its actions based on visual information about the board and the road, and not just on proprioceptive sensors.
In 2024, Japanese engineers taught the humanoid robot Musashi with a musculoskeletal structure to drive a car. He could change the direction of movement, accelerate to a set speed and slow down when pedestrians and other cars appeared.
Andrey Fokin
