Описание.
Изобретение относится к области авиации.
Известен гиперзвуковой летательный аппарат, содержащий фюзеляж, двигательная установка включает два турбореактивных двигателя, консоли крыла изменяемой в полете стреловидности, и систему управления /Патент США 3510088, 05.05.1970/.
В полете используются консоли крыла изменяемой в полете стреловидности, которые не могут быть полностью убраны внутрь фюзеляжа, а потому имеют большое лобовое сопротивление.
Известен самолет с газодинамической системой управления, выполненный с возможностью полета на гиперзвуковой скорости и содержащий фюзеляж, имеющий продольную плоскость симметрии, консоли крыла и два турбореактивных двигателя, каждый из которых выполнен с возможностью отбора газа в газодинамическую систему управления углом тангажа, крена и рысканья. /РФ2З71З52‚ 27.10.2009/.
В полете используются консоли крыла неизменяемой геометрии, которые имеют большое лобовое сопротивление.
Изобретение направлено на решение задачи уменьшения лобового сопротивления при полете с гиперзвуковой скоростью.
Изобретение направлено на решение задачи повышения маневренности за счет одновременного использования переднего горизонтального оперения и газодинамической системы управления.
Изобретение направлено на решение задачи предотвращения вибрации фюзеляжа вследствие вибрации консолей крыла под воздействием гиперзвукового потока воздуха.
Для решения задачи предложен гиперзвуковой самолет с газодинамической системой управления, содержащий фюзеляж, имеющий продольную плоскость симметрии, консоли крыла, каждая из которых включает корневую, промежуточную и концевую секции, которые выполнены с крюком на концевой части и шарнирно соосно установлены в фюзеляже, многодвигательный привод, предназначенный для изменения
размаха крыла путем одновременного воздействия на концевые секции консолей крыла, как силой рычага механизма, соединенного через винтовую передачу с валом электрического двигателя, установленного в продольной плоскости симметрии, так и моментом силы от вала соответствующего бокового электрического двигателя через планетарный редуктор, и два турбореактивных двигателя, каждый из которых выполнен с возможностью отбора газа в газодинамическую систему управления углом тангажа, крена и рысканья.
Каждая концевая секция выполнена с возможностью размещения внутри промежуточной секции, которая выполнена с возможностью размещения внутри корневой "секции, которая выполнена с возможностью размещения внутри фюзеляжа.
Рычаг соединен тягой через дополнительную винтовую передачу с валом дополнительного электрического двигателя, установленного в продольной плоскости симметрии.
Каждый турбореактивный двигатель выполнен с газоводом, расположенным между турбиной и соплом, при этом на стенке газовода расположена створка, предназначенная для отбора газа в газодинамическую систему управления.
Самолет снабжен цельноповоротным передним горизонтальным оперением, каждая консоль которого установлена внутри фюзеляжа с возможностью выдвижения в направлении от продольной плоскости симметрии фюзеляжа и изменения угла атаки с использованием привода с электродвигателем.
Газодинамическая система управления включает центральный газовод, который с одной стороны установлен на хвостовой части фюзеляжа с возможностью поворота относительно продольной оси фюзеляжа при отборе газа одновременно от каждого турбореактивного двигателя, и который с другой стороны имеет четыре ряда сопел с направляющими лопатками, предназначенными для создания управляющих сил и моментов по тангажу, крену и направлению полета.
Изобретение поясняется чертежами.
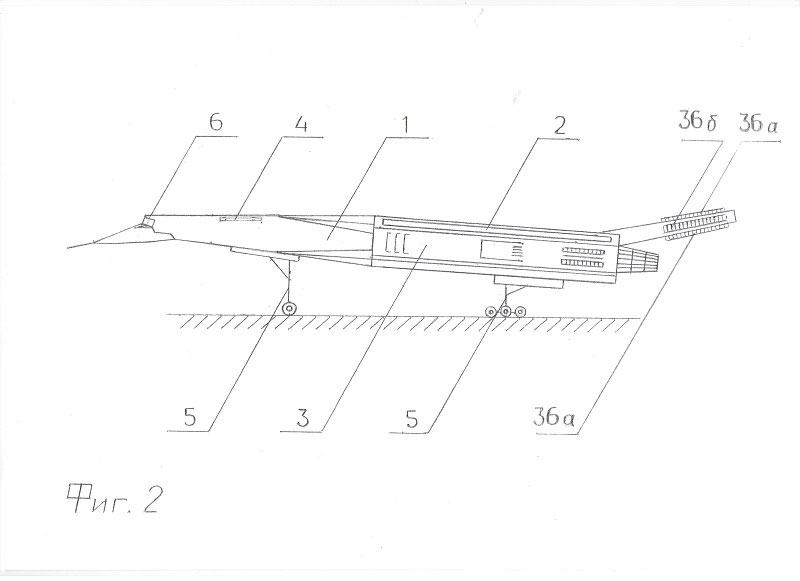 |
| Фиг.2 Самолет. Вид сбоку при посадке. |
| Источник: http://aviator.ucoz.org/ |
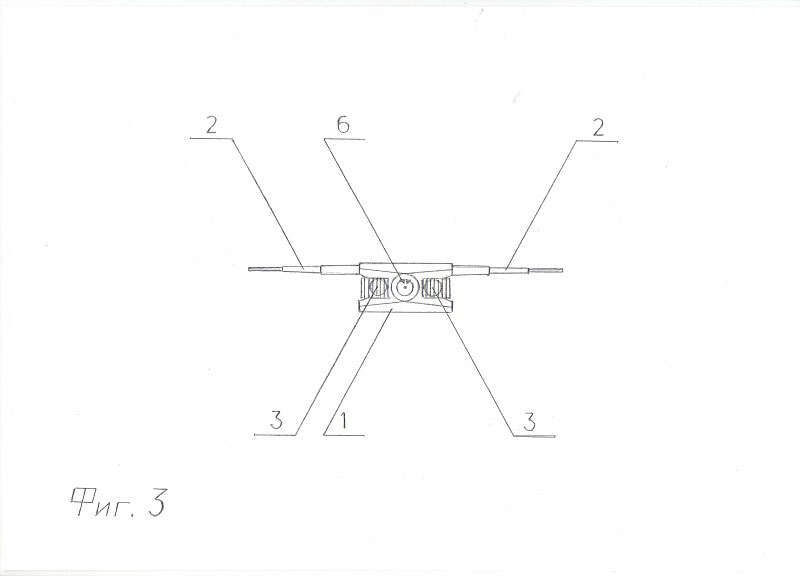 |
| Фиг. 3. Самолет. Вид спереди при полете на сверхзвуковой скорости. |
| Источник: http://aviator.ucoz.org/ |
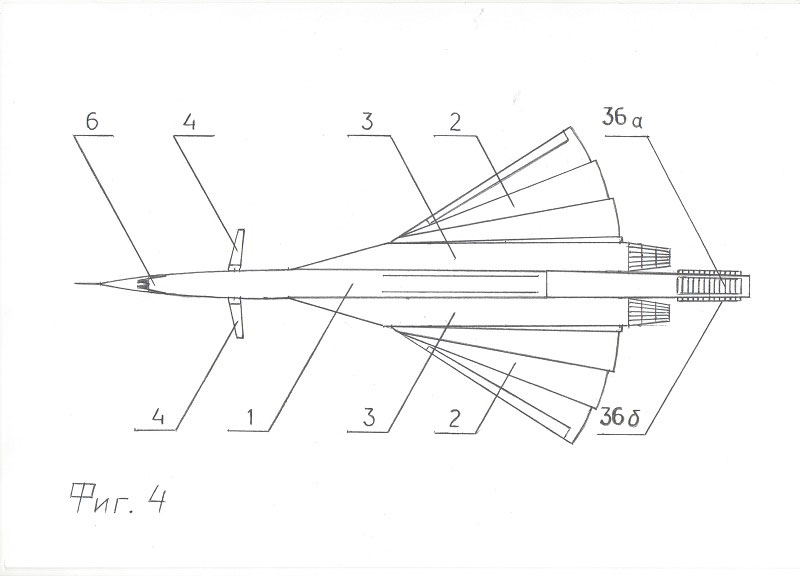 |
| Фиг. 4. Вид сверху при полете на дозвуковой скорости. |
| Источник: http://aviator.ucoz.org/ |
 |
| Фиг. 5. Вид спереди при полете на гиперзвуковой скорости. |
| Источник: http://aviator.ucoz.org/ |
 |
| Фиг. 6. Вид сбоку при полете на гиперзвуковой скорости. |
| Источник: http://aviator.ucoz.org/ |
 |
| Фиг. 7. Вид сверху при полете на гиперзвуковой скорости. |
| Источник: http://aviator.ucoz.org/ |
 |
| Фиг. 8. Вид сверху при полете на сверхзвуковой скорости. |
| Источник: http://aviator.ucoz.org/ |
 |
| Фиг. 9. Рычажный механизм поворота секций консолей крыла. |
| Источник: http://aviator.ucoz.org/ |
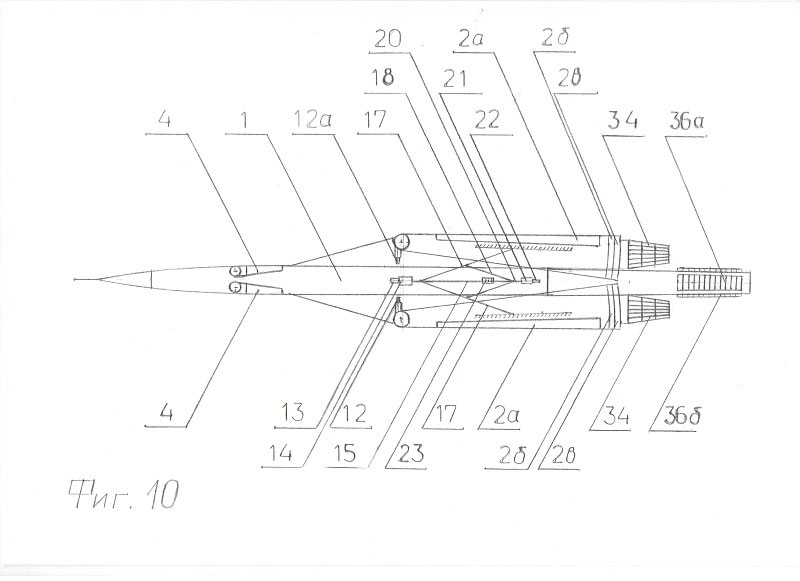 |
| Фиг. 10. Рычажный механизм. Секции консолей крыла сложены. |
| Источник: http://aviator.ucoz.org/ |
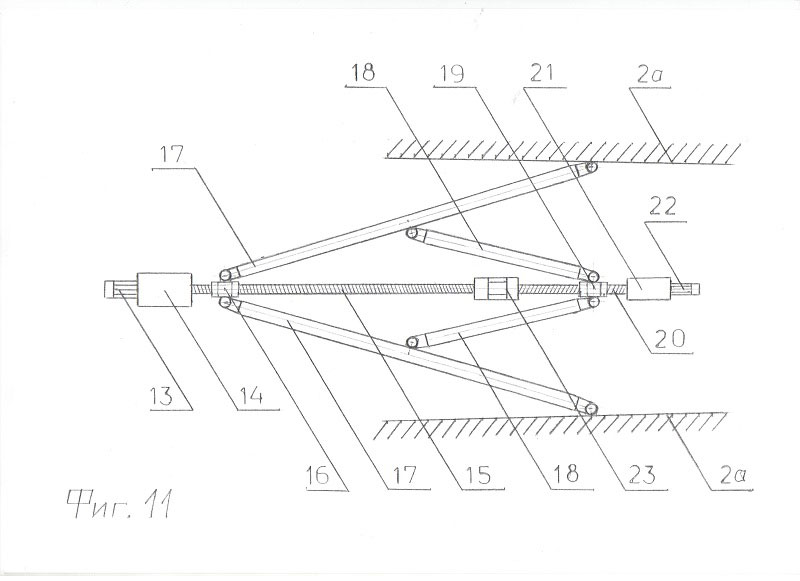 |
| Фиг.11 Рычажный механизм. Кинематическая схема. |
| Источник: http://aviator.ucoz.org/ |
 |
| Фиг. 12. Консоли крыла при повороте. |
| Источник: http://aviator.ucoz.org/ |
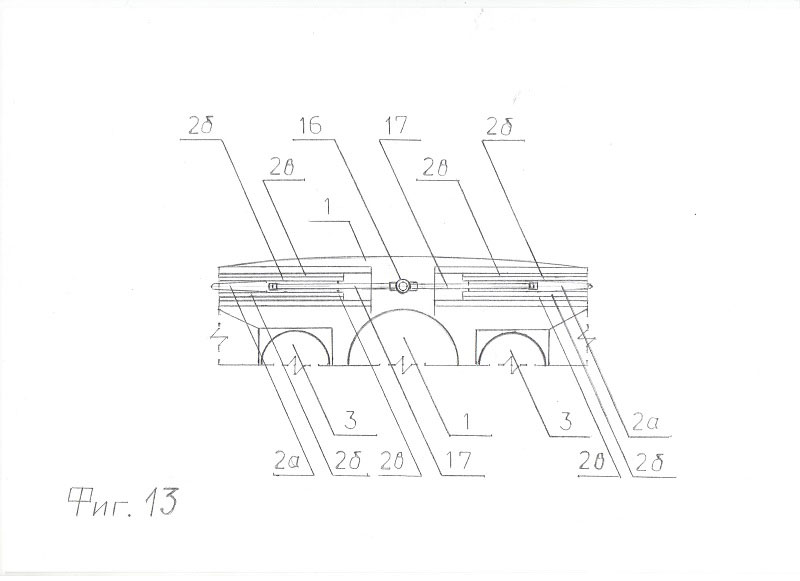 |
| Фиг. 13. Положение консолей крыла относительно фюзеляжа |
| Источник: http://aviator.ucoz.org/ |
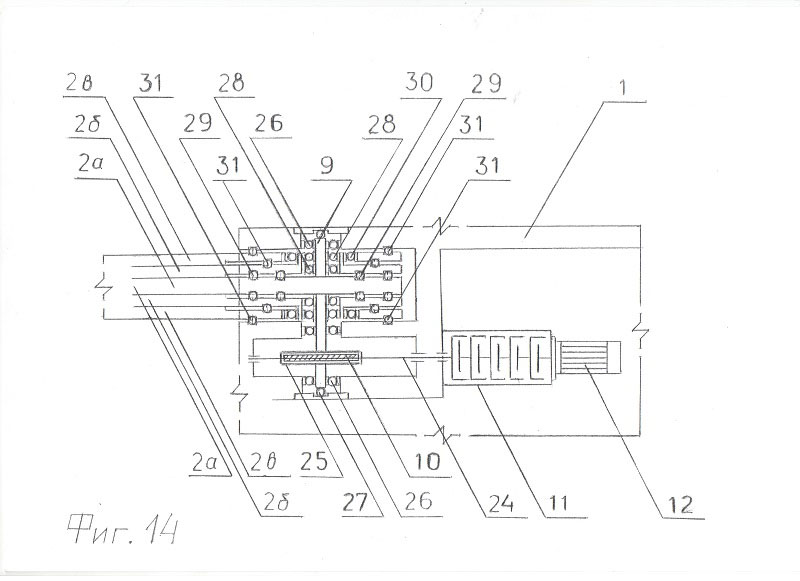 |
| Фиг. 14. Зубчатый механизм консолей крыла. Кинематическая схема. |
| Источник: http://aviator.ucoz.org/ |
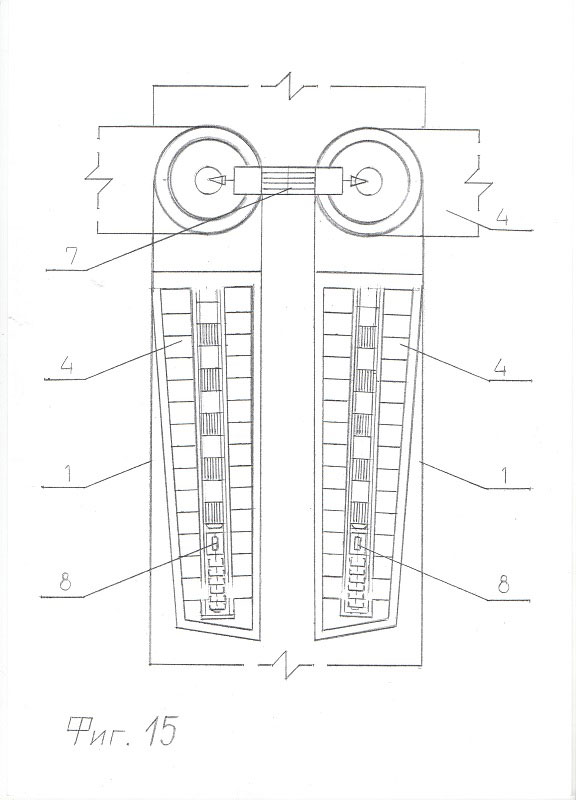 |
| Фиг. 15. Механизм поворота консолей переднего горизонтального оперения. |
| Источник: http://aviator.ucoz.org/ |
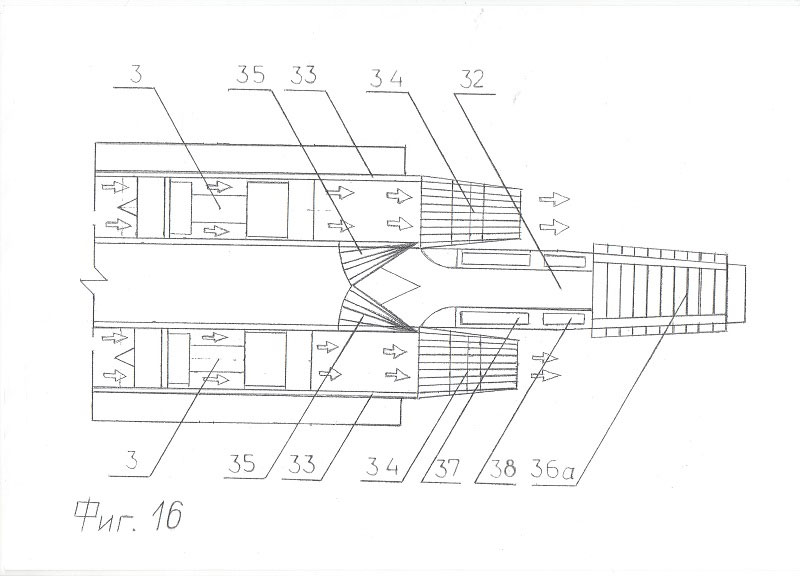 |
| Фиг. 16. Работа двигателей без отбора газа. |
| Источник: http://aviator.ucoz.org/ |
 |
| Фиг. 17. Работа двигателей с отбором газа. |
| Источник: http://aviator.ucoz.org/ |
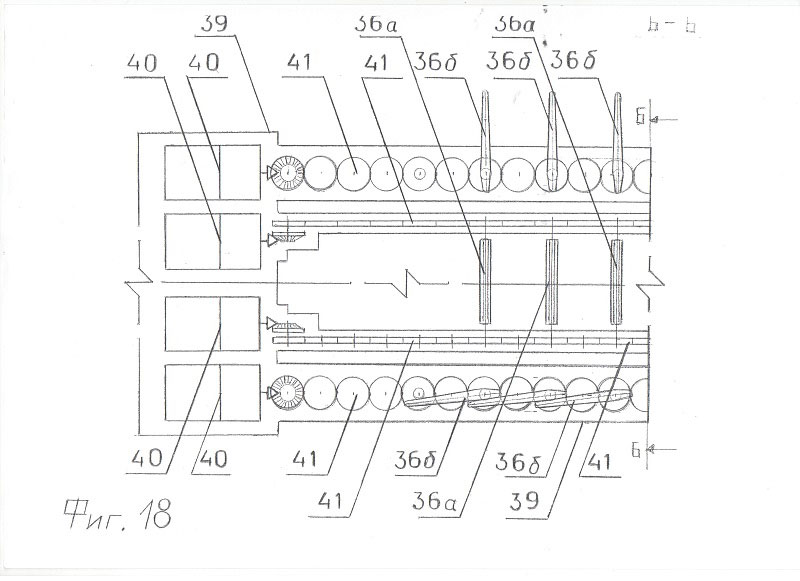 |
| Фиг. 18. Привод направляющих лопаток. |
| Источник: http://aviator.ucoz.org/ |
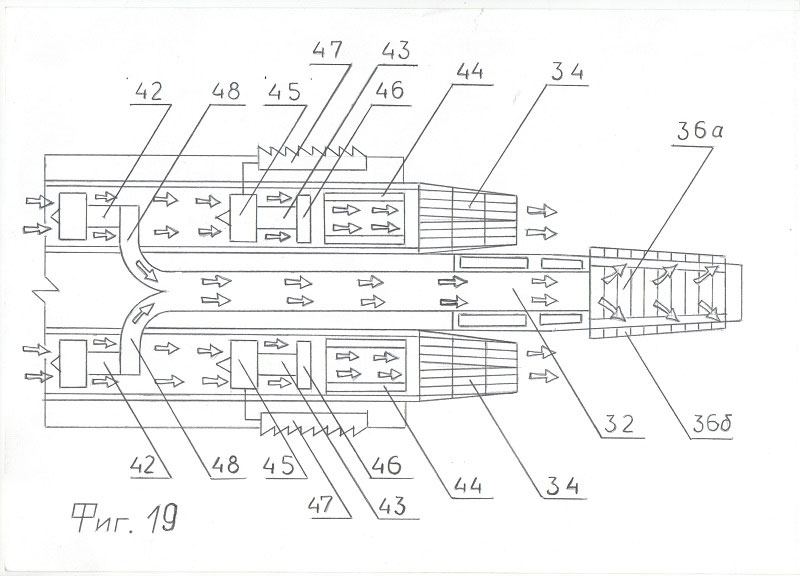 |
| Фиг. 19 Прямоточный двигатель работающий совместно с турбореактивным двигателем |
| Источник: http://aviator.ucoz.org/ |
Гиперсверзвуковой самолет с газодинамической системой управления содержит фюзеляж 1, правую и левую консоли крыла, два турбореактивных двигателя 3 с электрическими генераторами, консоли 4 переднего горизонтального оперения и шасси 5, включающее переднюю стойку и основные стойки.
Фюзеляж 1 включает кабину 6 с катапультирующими креслами, расположенную в опускающейся носовой части, правую и левую подвижные консоли крыла 2, два подъемно — маршевых турбореактивных двигателей 3, переднее горизонтальное оперение 4, шасси 5.
Фюзеляж 1 самолета содержит кабину 6 пилотов с катапультирующими креслами.
На фюзеляже 1 самолета расположены правая и левая подвижные консоли крыла 2 , каждая из которых шарнирно установлена на оси в плоскости фюзеляжа 1.
В процессе запуска силовой установки запускаются по одному из двух подъемно — маршевых турбореактивных двигателей 3. После запуска двух подъемно — маршевых турбореактивных двигателей 3 работают генераторы силовой установки, с которых напряжение подается на электродвигатели 7 механизма поворота переднего горизонтального оперения 4 (фиг.-15).
Из кабины 6 пилот с помощью тумблера подает напряжение на электродвигатели 7 механизма поворота переднего горизонтального оперения 4 (фиг.-15). Переднее горизонтальное оперение 4 поворачивается относительно оси по горизонтали фюзеляжа 1 самолета (фиг.-15‚ 4).
Затем из кабины 6 пилот с помощью тумблера подает напряжение одновременно на все четыре электродвигателя, на электродвигатели 9 механизма привода правой и левой зубчатыми передачами, предназначенными для выдвижения и возврата упомянутых секций консолей крыла 2 путем поворота, при этом каждая секция шарнирно установлена в фюзеляже 1 с возможностью поворота относительно оси вала 9, на котором закреплена концевая секция крыла 2, а соединенная с соответствующей зубчатой передачей червячного редуктора 10 с планетарным редуктором 11 вращаемым электродвигателем 12, одновременно напряжение поступает на электродвигатели 13 привода механизма движущих частей правой и левой консолей крыла 2. Двигатель 13 соединен с планетарным редуктором 14, который соединен с валом 15, имеющим трапециидальную резьбу. На валу 15 с трапециидальной резьбой размещена втулка16 с возможностью перемещения по валу 15 с трапециидальной резьбой, имеющая внутри ответную трапециидальную резьбу. Втулка 16 шарнирно соединена с основными тягами 17 с левой и правой стороны, основные тяги 17 щарнирно соединены концевой секцией крыла 2а, а также основные тяги 17 шарнирно соединены с дополнительными тягами 18 упора, также соединены щарнирно со втулкой 19. С правой и левой стороны вторая втулка 19, имеющая внутри ответную трапециидальную резьбу, размещена на втором валу 20 трапециидальной резьбой, которая соединена со вторым планетарным редуктором 21 вращаемым электродвигателем 22.
Между первым валом 15, имеющим правую трапециидальную резьбу, размещен упор 23, соединенный опорным подшипником скольжения с валом 15 и 20, как с одной стороны так и с другой опорным подшипником скольжения, соединенный со вторым валом 20, имеющим левую трапециидальную резьбу.
В процессе работы двух электродвигателей 13 и 22, первый вал 15, с правой трапециидальной резьбой вращается быстрей, перемещая втулку 16 с тягами 17 к упору 23, а второй вал 20, с левой трапециидальной резьбой вращается медленнее, перемещая втулку 19 , соединенную с тягами 18 упора шарнирно с основными тягами 17, также вторая втулка 19 с тягами перемещается к упору 23 (фиг.- 11, фиг.-9).
При перемещении втулки 16 с основными тягами 17 на первом валу 15 к упору 23 основные тяги 17 выталкивают концевую секцию крыла 2а, одновременно со вторым приводом с правой и левой зубчатыми передачами, предназначенными для выдвижения концевой секции крыла 2а, напряжение поступающее на электродвигатели 12 привода левой и правой консоли крыла 2а,б,в. Эти двигатели 12 (фиг.-14)‚ вращают шестеренки 24 в планетарном редукторе 11, шестеренки 24 планетарного редуктора 11 вращают шестеренку 25 червячного редуктора 10. Шестеренка 25 червячного редуктора 10 соединена с валом 9, который установлен на подшипниках 26 скольжения, а также на опорных подшипниках 27 скольжения к валу 9 закреплена концевая секция крыла 2а. На валу 9 установлена на подшипниках скольжения 28 промежуточная секция крыла 26, между концевой секцией крыла 2а и промежуточной секцией крыла 2б установлены опорные подшипники скольжения 29. При выдвижении концевой секции крыла 2а, концевая секция крыла зацепляет крючком упора (на чертеже не показано) промежуточную секцию крыла 26. На промежуточной секции крыла 2б установлена на подшипниках скольжения 30 корневая секция крыла 2в, где между ними установлены опорные подшипники скольжения 31. При выдвижении концевой секции крыла 2а и выдвижении промежуточной секции крыла 26, промежуточная секция крыла 26 зацепляет крючками упора (на чертежах не показано) корневую секцию крыла 2в, после чего начинает выдвигать корневую секцию крыла 2в. При полном выдвижении корневой секции крыла 2в крючком упора зацепляется конечный выключатель, после чего все четыре электродвигателя 12а, 126, 13, 22 (фиг.-14, фиг.-9‚ фиг.-11).
Хвостовая часть фюзеляжа 1 образует промежуточный газовод с кольцевым основанием, на котором установлен центральный газовод 32 с возможностью вращения.
Каждый турбореактивный двигатель 3 выполнен с газоводом 33 между турбиной двигателя 3 и поворотным соплом 34. Газоводы обоих турбореактивных двигателей 3 снабжены соответствующими створками 35, расположенными симметрично относительно продольной оси фюзеляжа 1, с возможностью отвода части газа после соответствующей турбины двигателя 3 через промежуточный газовод в центральный газовод 32 газодинамической системы управления.
Каждое сопло газодинамической системы управления снабжено направляющими лопатками 36 зубчатой передачей, которая установлена на центральном газоводе 32 с возможностью поворота соответствующих лопаток 36. На промежуточном газоводе установлен привод вращения центрального газовода 32, который включает электрические двигатели 37 с редукторами 38. На стенках газовода 33 расположена створка 35 с возможностью поворота внутрь для отвода части газа в центральный газовод 33 на хвостовой части фюзеляжа 1. Створка 35 может быть зафиксирована в любом угловом положении. На газоводе установлены в противоположные стороны два сопла, выполненные с поворотными направляющими лопатками 36а‚б для создания реактивной силы потока газа в одной плоскости, направленные в противоположные стороны. Два сопла с поворотными направляющими лопатками 366 для создания реактивной силы потока газа в другой поперечной плоскости. Сопла с поворотными направляющими лопатками З6а, 36б являются элементами газодинамической системы управления высотой и направлением полета самолета.
Поворотные направляющие лопатки З6а и 36б соединены с механизмом поворота, который включает корпус 39, электродвигатели 40 с редукторами и шестеренки 41.
Створки 36, расположенные вдоль стенок газовода 33 и ограничивают поступление газа в центральный газовод 32 на хвостовой части фюзеляжа 1. Для управления направлением полета по курсу створки 35 поворачивают внутрь газовода 33 для отвода части потока газа в центральный газовод 32 на хвостовой части фюзеляжа 1.
Дополнительно потоки газа из центрального газовода 32 могу быть направлены лопатками 366 под действием механизма поворота в противоположные стороны в диаметральной плоскости симметрии для создания силы тяги для изменения угла атаки.
Газодинамическая система управления за счет соответствующего положения лопаток 366 позволяет выполнить крутой поворот в воздухе на малых углах атаки, как в горизонтальном положении влево и вправо, так и в вертикальном положении вверх и вниз.
При взлете гиперсверхзвукового самолета — истребителя выдвинуто переднее горизонтальное оперение 4 (фиг.-15)‚ а также правая и левая подвижные консоли крыла 2. При движении гиперсверхзвукового самолета (фиг.-4‚ фиг.-2) по взлетно — посадочной полосе на переднем горизонтальном оперении 4 (фиг.-15) работает электродвигатель 8 с редуктором с помощью которого поворачивается плоскость переднего горизонтального оперения вверх на 45 градусов, что создает подъем передней части фюзеляжа 1 самолета при наборе максимальной скорости с работающими турбореактивными двигателями 3. Лопатки поворотного сопла 34 поворачиваются к верху, а также часть газа из центрального газовода 32 из сопла газодинамической системы управления с помощью лопаток З6а, газ направлен к верху, гиперсверхзвуковой самолет — истребитель начинает взлетать и набирает досверхзвуковую скорость в полете.
Подготовка самолета к полету на дозвуковой скорости и взлет.
Подготовка самолета к полету: запускаются турбореактивные двигатели 3, после чего работают генераторы, с которых Напряжение поступает на электродвигатели 7 механизма поворота консолей переднего горизонтального оперения 4 (фиг.-15). Работающие двигатели 7 механизма поворота консолей выдвигают из фюзеляжа 1 самолета переднее горизонтальное оперение 4 (фиг.-4, фиг.-9). Затем напряжение одновременно поступает на электродвигатели 12а‚ 126 зубчатого механизма (фиг.-14) выдвижения консолей крыла 2 и одновременно напряжение поступает на электродвигатели 13, 22 рычажного механизма (фиг.-11, фиг.-10, фиг.-9) выдвижения консолей крыла 2.
После полного выдвижения консолей крыла 2а‚ 26, 2в (фиг.-14, фиг.-9, фиг.-4) самолет начинает движение по взлетно — посадочной полосе, затем с генератора напряжение поступает на электродвигатели 8 механизма поворота плоскости по горизонтали оси фюзеляжа 1 самолета.
Плоскость переднего горизонтального оперения 4 поворачивается на 45 градусов к верху, что создает подъем передней части фюзеляжа 1 самолета. При наборе максимальной скорости на взлетно — посадочной полосе, на работающих турбореактивных двигателях лопатки поворотного сопла З4(фиг.-9) поворачиваются к верху, также часть газа из центрального газовода 32, из сопла газодинамической системы управления с помощью лопаток 36а газ направлен к верху, гиперсверзвуковой самолет начинает взлетать, после чего набирает дозвуковую скорость в полете.
Подготовка самолета к полету на гиперсверхзвуковой скорости.
В полете самолета в досверхзвуковой скорости с генератора турбореактивного двигателя 3 напряжение поступает на электродвигатели 7 механизма поворота консолей переднего горизонтального оперения 4 (фиг.- 15). Работающие электродвигатели 7 механизма переднего горизонтального оперения 4 поворачивают консоли переднего горизонтального оперения 4 во внутрь фюзеляжа 1 самолета (фиг.-8), после чего самолет начинает набирать сверхзвуковую скорость в полете. Самолет на сверхзвуковой скорости в полете с работающих генераторов турбореактивных двигателей 3 напряжение поступает одновременно на все электродвигатели 12а, 126 зубчатого механизма (фиг.-14) выдвижения консолей крыла 2 и одновременно напряжение поступает на электродвигатели 13, 22 рычажного механизма (фиг.-11‚ фиг.-10‚ фиг.-9) выдвижения консолей крыла 2. В процессе работы этих электродвигателей 12а, 126, 13, 22 работающие механизмы начинают поворачивать консоли крыла 2а‚ 26, 2в во внутрь фюзеляжа 1 самолета (фиг.-10, фиг.-7‚ фиг.-13), после чего самолет начинает набирать гиперсверхзвуковую скорость(фиг.-6, фиг.-7).
Полет на гиперзвуковой скорости с использованием газодинамической системы управления.
В полете на гиперзвуковой скорости управление самолетом осуществляется с помощью газодинамической системы управления.
В полете для изменения направления полета самолета, створки 35 поворачиваются во внутрь газовода 33 на небольшую величину. Поток газа через створки 35 поступает в центральный газовод 32. С Центрального газовода 32 поток газа поступает на сопло привода направляющих лопаток 366, где с помощью лопаток 366 поток газа направлен под углом на 90 градусов влево, либо вправо, где самолет меняет направление в полете либо вправо, либо влево. Для направления самолета вверх или вниз на сопле привода направляющих лопаток 36, лопатки 366 закрыты, а лопатки 36а открываются и направляют поток газа под углом на 90 градусов либо вверх, либо вниз. Самолет начинает набирать высоту, либо уменьшать высоту.
Самолет может менять направление высоты с помощью турбореактивных двигателей 3, а именно с помощью поворотных сопел 34, где лопатки поворотного сопла 34 турбореактивного двигателя 3 направлены либо вниз, либо вверх.
Подготовка самолета к посадке на дозвуковой скорости.
Для перехода из гиперзвуковой скорости самолета в сверхзвуковую скорость летчик с помощью ручки газа уменьшает обороты турбин турбореактивного двигателя З, скорость самолета начинает уменьшаться до сверхзвуковой. Напряжение с генератора турбореактивного двигателя 3 одновременно поступает на все электродвигатели 12а‚ 126 зубчатого механизма (фиг.-14) выдвижения консолей крыла 2 и одновременно напряжение поступает на все электродвигатели 13 и 22 рычажного механизма (фиг.-1 1) выдвижения консолей крыла 2. В процессе работы этих электродвигателей 12а‚ 126,13, 22 работающие механизмы начинают поворачивать консоли крыла 2а, 2б, 2в выдвигать из фюзеляжа 1 самолета (фиг. З).
Для перехода из сверхзвуковой скорости самолета в дозвуковую скорость летчик с помощью газа уменьшает обороты турбин турбореактивных двигателей 3. Скорость самолета начинает уменьшаться на дозвуковую. С работающих генераторов турбореактивных двигателей 3 напряжение подается на электродвигатели 7 механизма поворота консолей переднего горизонтального оперения 4. Механизм поворота консолей начинает выдвигать переднее горизонтальное оперение 4 из фюзеляжа 1 самолета (фиг.-4).
Для перехода самолета к посадке на дозвуковой скорости самолет снижает высоту, опускает передний обтекатель, дающий хороший обзор из кабины 6 летчикам, одновременно поднимается центральное сопло с приводом направляющих лопаток 36а,б, а также опускают переднее и основные шасси 5 (фиг.-2).
С турбореактивных двигателей 3 отработавший газ по газоводу 33, через створки 35 поток газа поступает в центральный газовод 32 хвостовой части фюзеляжа 1 самолета, из центрального газовода 32 поток газа поступает в сопло привода направляющих лопаток 36а, где с помощью направляющих лопаток 36а поток газа направлен в противоположном направлении, выполняющим роль реверса (фиг.-1, фиг.-2). При касании шасси 5 самолета со взлетно — посадочной полосой снижает его пробег.
Это техническое решение торможения позволит отказаться от тормозных парашютов при посадке самолета на взлетно — посадочную полосу.
Формула.
- Гиперзвуковой самолет с газодинамической системой управления, содержащий фюзеляж, имеющий продольную плоскость симметрии, консоли крыла, каждая из которых включает корневую, промежуточную и концевую секции, которые выполнены с крюком на концевой части и шарнирно соосно установлены в фюзеляже, многодвигательный привод, предназначенный для изменения размаха крыла путем одновременного воздействия на концевые секции консолей крыла, как силой рычага механизма, соединенного через Винтовую передачу с валом электрического двигателя, установленного в продольной плоскости симметрии, так и моментом силы от вала соответствующего бокового электрического двигателя через планетарный редуктор, и два турбореактивных двигателя, каждый из которых выполнен с возможностью отбора газа в газодинамическую систему управления углом тангажа, крена и рысканья.
- Самолет по п.1, отличающийся тем, что каждая концевая секция выполнена с возможностью размещения внутри промежуточной секции, которая выполнена с возможностью размещения внутри корневой секции, которая выполнена с возможностью размещения внутри фюзеляжа.
- Самолет по п.1, отличающийся тем, что упомянутый рычаг соединен тягой через дополнительную Винтовую передачу с валом дополнительного электрического двигателя, установленного в продольной плоскости симметрии.
- Самолет по п.1, отличающийся тем, что каждый турбореактивный двигатель выполнен с газоводом, расположенным между турбиной и соплом, при этом на стенке газовода расположена створка, предназначенная для отбора газа в газодинамическую систему управления.
- Самолет по п.1, отличающийся тем, что он снабжен цельноповоротным передним горизонтальным оперением, каждая консоль которого установлена внутри фюзеляжа с возможностью выдвижения в направлении от продольной плоскости симметрии фюзеляжа и изменения угла атаки с использованием привода с электродвигателем.
- Самолет по п.1, отличающийся тем, что газодинамическая система управления включает центральный газовод, который с одной стороны установлен на хвостовой части фюзеляжа с возможностью поворота относительно продольной оси фюзеляжа при отборе газа одновременно от каждого турбореактивного двигателя, и который с другой стороны имеет четыре ряда сопел с направляющими лопатками, предназначенными для создания управляющих сил и моментов по тангажу, крену и направлению полета.
Сопроводительная записка к изобретению «Гиперзвуковой самолет с газодинамической системой управления»
В России приостановлены работы над созданием гиперзвукового самолета. Специалисты признают бесперспективными управляемые полеты на гиперзвуке – один из любимых проектов Дмитрия Рогозина. Он предположил, что на «Радуге» не решили проблему с прямоточным турбореактивным двигателем, который необходим, что бы летательный аппарат развил гиперзвуковую скорость.
В 1990-е годы Россия отказалась от похожей разработки «Клипер», масса не решаемых технических проблем: теплоизоляция корпуса на сверхвысоких скоростях, форма воздухозаборника, работа двигателя. В частности, что бы такой самолет летел на гиперзвуке, реактивная струя двигателя должна иметь скорость от 5 Маха, иначе произойдет резкая потеря мощности. В одно время с «Клипером» была закрыта программа «Север» - гиперзвуковой прямоточный воздушно-реактивный двигатель со сверхзвуковым горением. Самолет с таким двигателем имел бы радиус разворота в десятки километров и практически не мог маневрировать, кроме того перегрузки пилотов становились смертельными. Сейчас не решаемой проблемой остается двигатель. Не только стабильно поддерживающий работу в сверхзвуковом режиме, но и способный перейти на гиперзвук.
У меня есть два варианта двигателей для гиперзвукового самолета, а именно один из них на Фиг. 19, прямоточный двигатель работающий совместно с турбореактивным двигателем, где устойчиво поддерживается реактивная струя в двигателе при работе одновременно турбореактивного двигателя с прямоточным, есть вариант где двигатель гиперзвукового самолета работает раздельно, а именно прямоточный двигатель работает раздельно от двигателя турбореактивного, но прямоточный двигатель непосредственно связан с двигателем турбореактивным для поддержания реактивной струи в прямоточном двигателе, такой вариант двигателя я хотел бы применить на другом изобретении гиперзвуковом самолете – истребителе - перехватчике с газодинамической системой управления, где будут сняты все проблемы теплоизоляцией корпуса на сверхвысоких скоростях. Кроме того будет применена не обычная кабина для пилотов, не имеющая аналогов в мире, позволяющая перенести перегрузки у пилотов не ухудшая их здоровье. На новом изобретении гиперзвуковом самолете - истребителе - перехватчике с газодинамической системой управления, будет применима не обычная силовая схема, позволяющая отказаться от применяющихся на самолетах стрингеры и шпангоуты, а также не обычный обтекатель , позволяющий легко набрать гиперзвуковую скорость на большой высоте в полете. Но у меня нет средств оформить заявку на изобретение. И поэтому прошу рассмотреть этот вариант изобретения «Гиперзвукового самолета с газодинамической системой управления, аналог другой заявки на изобретения «Гиперзвуковой самолет – истребитель – перехватчик с газодинамической системой управления».
Автор изобретения: Валерий Сиротин