
Это антропоморфный и торсовый роботы
Научно-производственное объединение «Андроидная техника» (разработчик робота «Фёдор») предложило использовать на Луне полностью антропоморфного робота или торсового. С таким предложением выступил исполнительный директор организации Евгений Дудоров.
На представленных изображениях показан робот с ногами и торс антропоморфного робота, прикреплённый к колёсной платформе. По мнению исполнительного директора НПО «Андроидная техника», подобные аппараты могут быть созданы в ближайшем будущем. Они смогут проводить инспекцию, устанавливать и обслуживать оборудование, помогать космонавтам во время внутри- и внекорабельной деятельности.
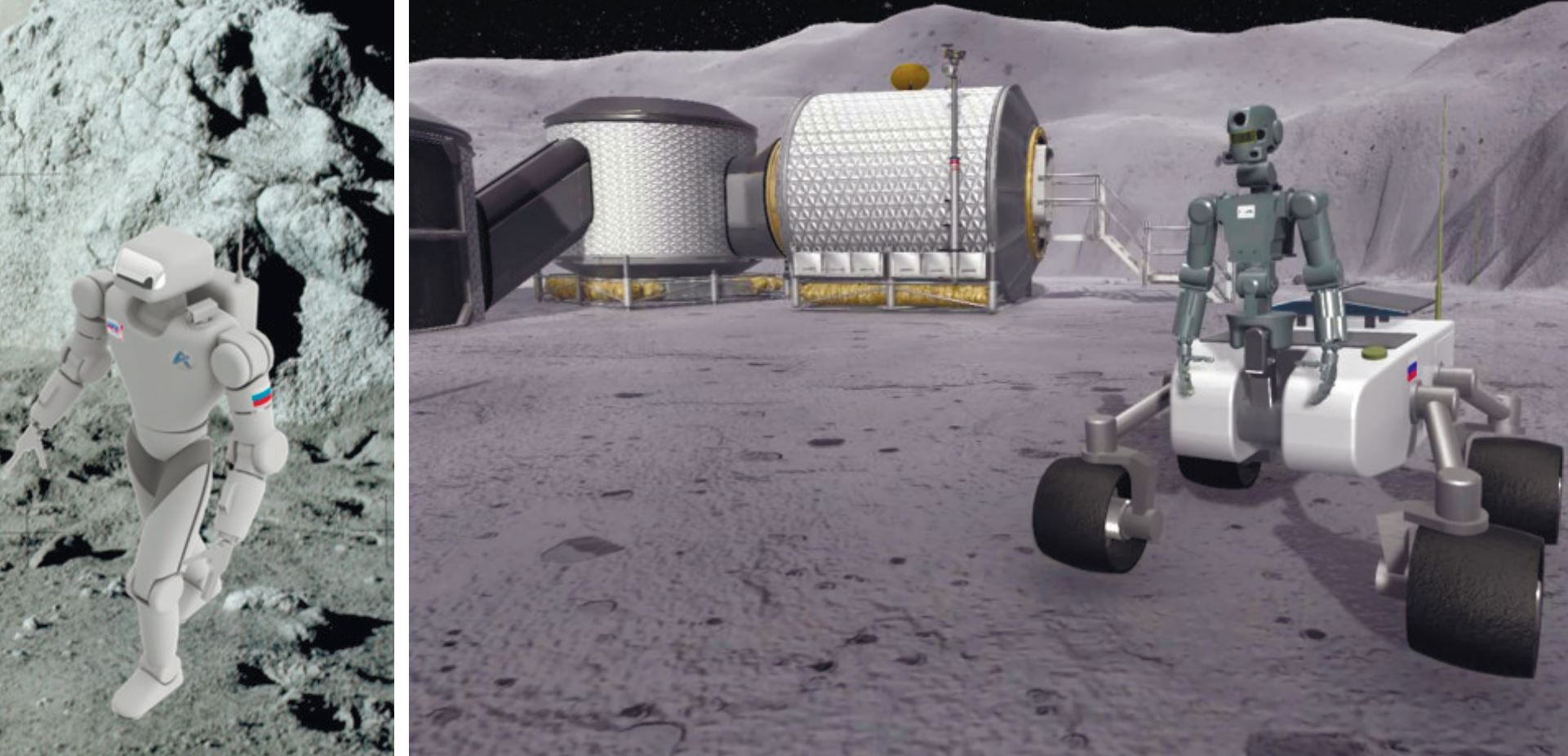 |
| Два варианта лунного робота. |
| Источник: Андроидная техника |
Прототип робота, предположил Дудоров, может быть отправлен во время сертификационного полёта лунного взлётно-посадочного корабля (ЛВПК). Но для этого потребуется разработка дополнительной оснастки, чтобы вынести научную аппаратуру.
Программа-максимум может подразумевать не только съёмку старта взлётного модуля, но и возможность длительной консервации робота для преодоления лунной ночи, а также расконсервации перед прилётом космонавтов.
Также Евгений Дудоров выделил пять ключевых типов роботов космического назначения, которые, по его мнению, потребуются для освоения Луны.
В первую группу входят научно-исследовательские роботы, к которым относятся роверы, луноходы, летательные аппараты. Во вторую группу входят промышленные РТС для транспортировки грузов, добычи, сбора и переработки полезных ресурсов, дробления, перемешивания, спекания реголита. Ещё одну группу составляют манипуляционные роботы. Они, отметил Дудоров, необходимы для монтажа, демонтажа и разгрузки оборудования.

Антропоморфные роботы, убеждён эксперт, смогут выполнять операции с тонкой моторикой и рутинные работы, а свободнолетающие роботы — обеспечивать информационную и психологическую поддержку экипажу.
В августе 2019 года на МКС был доставлен антропоморфный робот «Фёдор» (Skybot F-850), созданный НПО «Андроидная техника» и Фондом перспективных исследований. На станции российский экипаж провёл с ним ряд экспериментов, во время которых космонавт Александр Скворцов управлял роботом с помощью костюма-аватара, а его коллега Алексей Овчинин контролировал процесс и взаимодействовал с андроидом. Робот «Федор» работал с дрелью, полотенцем и электрооборудованием, а также отвечал на вопросы.
