
Каким должен быть русский подводный беспилотник?
Сообщение о скором появлении в стране первой боевой подлодки-робота «Цефалопод» («Головоногий») вызвало всяческие пересуды. Пока нет ничего определенного. Мы же зададимся вопросом: а каким надо делать перспективную субмарину-автомат?
«Главное оружие подводной лодки – скрытность!» – звучало в аудитории. Третий курс, военно-морская кафедра Таганрогского радиотехнического университета. Я бы поспорил тогда с капитаном 3-го ранга Медовым, но в далеких 90-х был молод и неопытен. Сейчас, испытав много разного вооружения различных проектов лодок, могу смело утверждать: главное оружие подводной лодки – опытный экипаж, способный эффективно использовать все ее возможности, в том числе и ее «главного оружия» – скрытности.
“ Робот смог бы обнаруживать цели и выходить с ними на собственный контакт на дистанциях, в разы больших дистанций его обнаружения целями ”
Автоматизация деятельности команды атомной или дизельной подводной лодки – задача крайне нетривиальная и разбивается даже на этапе ее «мозгового штурма» на десятки сложных подзадач. Какое нужно вооружение необитаемому аппарату? Должен ли этот аппарат быть абсолютно необитаем или все же (по крайней мере в мирное время) один-два специалиста могут подстраховывать робота? Какие задачи ставить перед таким подводным «летучим голландцем»? Можно ли доверить бездушной железяке выход на радиосвязь со спутником или на гидроакустическую связь с такой же лодкой или стационарным гидроакустическим комплексом? В общем, наша Лаборатория будущего объявляет о закладке на наших виртуальных стапелях необитаемого подводного аппарата будущего – «Восьминог».
Для чего, например, нам мог бы понадобиться подобный подводный робот? Какие задачи можно возложить на него в мирное и не очень время? Давайте думать. Итак…
Головоногий исследователь
В мирное время, чтобы не ржавели даром народные денежки, «Головоногого» можно использовать как инструмент изучения структуры дна Мирового океана. Высокочастотная акустика, направленная вверх и вниз, поможет определить наличие и структуру ледового покрова над лодкой, одновременно помогая держать дистанцию в безопасном диапазоне, а также показать глубину и структуру донного покрытия (Рис 1).
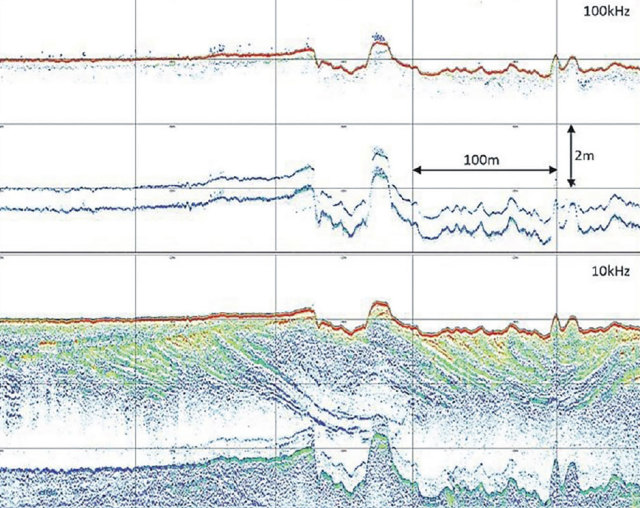
Рисунок 1. Результат донного профилирования – зависимость глубинной структуры дна в пространстве
Ходить такой аппарат может, одновременно выполняя и учебно-боевые задачи (скажем, поиск «древних» морских мин), и коммерческие. Например, поиск газовых месторождений на шельфе, для чего место торпедного отсека займет мощный сверхнизкочастотный акустический излучатель или пневмопушка, или обнаружение и классификация затонувших объектов.
Автоматический тральщик
Как в мирное время, так и в угрожаемый период или военное время «Восьминог» может работать как морской скрытный тральщик. Среднечастотная акустика определит мину еще до того, как лодка войдет в зону срабатывания датчиков «подводной смерти», а высокочастотная позволит не только подтвердить контакт с миной, но и классифицировать ее.
Недурно снабдить противоминный вариант нашего моллюска средствами уничтожения, например универсальными самоуправляемыми зарядами, которые годятся и в борьбе с торпедами, о чем ниже. Но даже если задача уничтожения мин перед роботом не стоит, то умная «голова» подводного аппарата выберет оптимальную траекторию, огибающую как одиночную мину, так и минный рубеж или минное поле, да и хаотично наставленную минную банку не только обойдет, но и локализует, записав координаты крайних мин (Рис. 2).
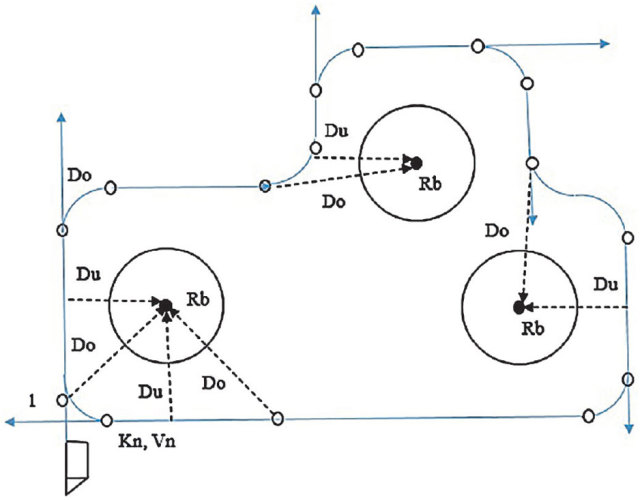
Рисунок 2. Схема маневра лодки-робота в процессе локализации минного поля из произвольно постановленных мин
Робомоллюск-разведчик
В мирное время, когда задачи немного гуманнее, нежели уничтожение или потопление, очень важно изучать противника. Шумы его двигателей, эхосигналы, отраженные от корпуса, сигналы гидроакустических средств. Это делается для того, чтобы оценивать признаки объекта, по которым, когда уже объект станет целью, правильно классифицировать его. Для того чтобы «срисовать портрет» подводной лодки или боевого корабля, нашему роботу придется:
- обнаружить объект на дистанции большей, нежели дистанция обнаружения его объектом. Здесь сработает информация от низкочастотной гидроакустической антенны с гибкой протяженной буксируемой антенной (ГПБА);
- классифицировать его;
- аккуратно занять позицию слежения за объектом в зависимости от его типа (лучше всего в кильватер);
- записывать все шумы и сигналы, издаваемые объектом в режиме собственной тишины всей гидроакустической аппаратурой во всех полосах частот, при этом меняя курсовые углы слежения для определения анизатропии (неравномерности) акустического портрета объекта (Рис. 3 и 4).
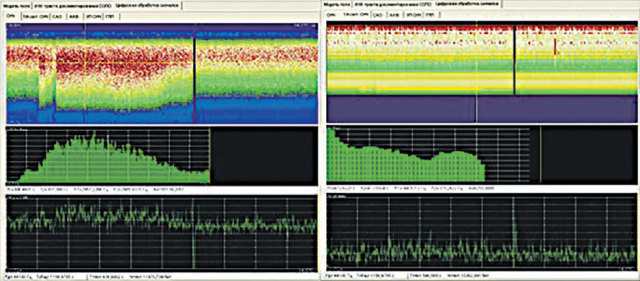
Рисунок 3. Спектры шумов морского объекта в различных частотных полосах
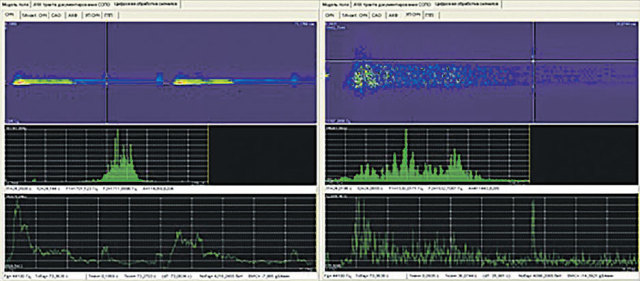
Рисунок 4. Спектры эхосигналов морского объекта в различных частотных полосах
Беспилотный убийца
Но вот перед нашим «Восьминогом» поставили задачу патрулирования района с тотальной его зачисткой от любых небиологических объектов. Стоп – не объектов, а потенциальных целей, предназначенных к уничтожению. А это значит, что он должен первое – двигаться бесшумно, второе – слышать дальше, третье – реагировать быстрее. И вот наш головоногий друг неспешно движется по некой траектории в пределах района. И вдруг его датчики системы обнаружения кильватерного следа обнаруживают «следоподобную аномалию»! Робот начинает движение по спирали, выискивая направление кильватерного следа. А найдя, надежно удерживает, в чем ему успешно помогает как многофункциональный среднечастотный гидроакустический комплекс, так и системы профилирования дна и ледового покрова, но уже в режиме поиска кильватерного следа. Не беда, что скорость цели может быть выше скорости «Восьминога», главное – это установить контакт. В случае очевидного устаревания следа робот подвсплывет и передаст всю информацию куда надо. А если все же удалось перейти с неакустического контакта на акустический – классифицируем, отрабатываем «свой-чужой» и на дно. Залп двух торпед, наводящихся как по кильватерному следу, так и по эхосигналам, не даст противнику шанса. А если в торпеды заложены алгоритмы ситуационного анализа, не позволяющие обмануть головки самонаведения выстреливаемыми целью системами гидроакустического противодействия, последней каюк.

Подлодки-роботы становятся модной темой. Проект «Сарма», РФ. Фото: google.com
Щелкнул внутренний триггер – «за мной следят»? Моментально, но бесшумно ставится дрейфующий (чтобы сохранить скрытность) гидро-гидроакустический буй (передача данных по каналу гидроакустической связи), лодка занимает глубину минимального ее обнаружения, снижает скорость до максимально малошумной, выпускает «мини-параван» (ГПБА), слушая позади себя… В моей практике только так наши подводные гвардейцы «ловили за хвост» хваленых «лосей» (подводная лодка ВМС США типа «Лос-Анджелес»). И никаких разворотов типа «безумный Иван», когда лодка начинает вдруг циркулировать на глазах обалдевшего неприятеля, который ведет ее как пуделя на поводке. Вообще различные варианты уклонения от слежения многочисленны, поэтому чтобы супостат, если поймал «Головоногого» «на крючок», не смог отследить периодичность и последовательность действий по обнаружению слежения, они чередуются через случайные промежутки времени в случайном же порядке.
Цель классифицирована как «торпеда»? Внимание, торпедная атака! После оценки угрозы и времени сближения вплотную лодка делает хитрый маневр, прикрываясь облаком мобильных средств гидроакустического противодействия и выставляя несколько имитаторов. Если и в этом случае торпеда не была сбита с толку, следует выстрел дрейфующего противоторпедного заряда, который, как вратарь в воротах, ловит торпеду, смещаясь по глубине и направлению вслед за ней. Однако это уже другая история.
Немного про сетецентрику
Сетецентрическая война основана на интеграции всех используемых в ней объектов (как военного, так и двойного и даже гражданского назначения) в единую информационную сеть, центр управления которой в случае выхода из строя одного из них мог бы сразу, практически без потери информационных массивов переходить к другому. Сеть, жадно впитывающая разведывательную информацию в реальном масштабе времени, обрабатывающая ее сверхсовременными алгоритмами, анализируя и прогнозируя обстановку и принимая решения, позволяющие развернуть развитие ситуации в свою пользу. Основной инструмент обеспечения информационного обмена – связь. По воздуху – радиосвязь, по воде – связь гидроакустическая. Безусловно, наш «Головоногий» должен входить в состав сети на правах самостоятельного объекта и обладать и тем, и другим видом. В применении к гидроакустической связи можно сказать одно: она должна обеспечиваться с использованием всех бортовых гидроакустических средств. Гидроакустическая связь между описываемыми «Головоногими» должна осуществляться после установления надежного контакта, взаимной классификации и опознавания, разумеется, в режимах, максимально обеспечивающих скрытность.
И снова мультистатика
В статье «Траулер для подлодок» автором была описана перспективнейшая технология обнаружения подводных и погруженных целей (метод мультистатической локации), когда источник гидроакустического сигнала и приемники эхосигналов от целей пространственно разнесены. В нашем случае «Восьминог» мог бы стать идеальным приемником сигналов «подсветки», излучаемых источником, скрываться которому нет надобности. В этом случае робот смог бы обнаруживать цели и выходить с ними на собственный контакт на дистанциях, в разы больших дистанций его обнаружения целями.
Обитаемость необитаемого
В «подводном минном аппарате» (прообразе подводной лодки) Джевецкого длиной около шести, высотой полтора и шириной чуть более метра, испытанной в Гатчине в 1879 году, экипаж составлял три (три!) человека. Поэтому в лодке-роботе водоизмещением более 200 тонн (теоретически) вполне можно разместить экипаж из двух человек с полным циклом жизнеобеспечения. Мини-АРМы и электронная система управления такого автоматизированного подводного аппарата, имеющего в «голове» алгоритмы решения всех вышеперечисленных задач, могли бы обеспечить перевод лодки в ручное управление в случае нештатных ситуаций, а также обкатать алгоритмы и обучить системы классификации в мирное время. Естественно, экипаж должен обитать в моментально отстреливаемой всплывающей полуавтономной капсуле, к которой подводились бы только информационные потоки между роботом и людьми. Но для этого лодка должна быть длиной не менее 20–25 метров. У «Цефалопода» же, разрабатываемого «Рубином» и являющегося прообразом нашего «Восьминога», длина составляет около 10 метров, что было бы достаточно только для моряков лодки Джевецкого. Надеемся, рубиновцы, рисуя сразу на чистовике, не ошибутся в выборе контрагентов (Рис. 5)…
Рисунок 5. Беспилотный подводный аппарат проекта «Цефалопод»
Итожим
На нашего перспективного подводного необитаемого (или малоэкипажного) «Восьминога» возложены следующие задачи:
- автоматический выбор режима движения и режимов работы бортового оборудования в зависимости от решаемой задачи;
- донное профилирование, определение профиля и структуры дна, в том числе определение глубин (батиметрия);
- обнаружение и определение границ и структуры ледового покрова;
- поиск донных аварийных объектов, в том числе излучающих аварийные сигналы;
- поиск донных и якорных мин, их локализация или уничтожение;
- поиск, обнаружение, определение элементов движения, классификация, идентификация, выбор режима слежения, сопровождение и уничтожение морских целей;
- в случае подозрения на слежение за собой применение гидро-гидроакустических буев с уклонением и занятием позиции относительно следящего объекта;
- в случае торпедной атаки контратака и уклонение с применением мобильных средств гидроакустического противодействия;
- в процессе слежения в случае необходимости атака цели, ее уничтожение мини-торпедами с последующим уклонением (Рис. 6).
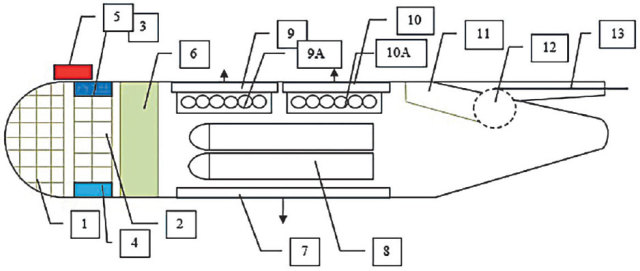
Рисунок 6. Один из вариантов обобщенного облика противолодочного вооружения «Восьминога»
Здесь: 1 – носовая гидроакустическая антенна; 2 – комплекс бортовых антенн; 3 – антенна тракта ледовой разведки; 4 – антенны трактов батиметрии и донного профилирования; 5 – датчики системы обнаружения кильватерного следа; 6 – интегрированная система управления; 7 – устройство выстреливания торпед; 8 – комплект торпед; 9 – устройство выстреливания средств пртивоторпедной защиты; 9А – комплект средств пртивоторпедной защиты (мобильные средства гидроакустического противодействия); 10 – устройство выстреливания средств торпедного уничтожения и гидро-гидроакустических буев; 10А – комплект средств торпедного уничтожения (мобильные самоуправляемые заряды) и гидро-гидроакустические буи; 11 – тракт обработки информации от гидроакустической протяженной буксируемой антенны (ГПБА); 12 – устройство постановки и выборки ГПБА; 13 – непосредственно гидроакустическая протяженная буксируемая антенна
Напоследок скажем главное. Подавляющее число видов вооружения, перечисленных и описанных в данной статье, давно создано или создается сейчас. Подавляющее число алгоритмов отработано и внедрено в составе аппаратно-программных макетов. И поверьте, наш перспективный «Цефа…», пардон, «Восьминог» скоро сойдет не только с «виртуальных стапелей» Лаборатории будущего, но это совсем другая история.
Виталий Шпикерман, капитан 2-го ранга в отставке
Газета "Военно-промышленный курьер", опубликовано в выпуске № 38 (851) за 6 октября 2020 года
