Небезынтересное патентное описание технических решений разработанной киевской компанией ООО "Радионикс" активной радиолокационной головки самонаведения АРГСН-05R противокорабельной ракеты Р-360 украинского противокорабельного ракетного комплекса РК-360МЦ "Нептун". Головка самонаведения АРГСН-05R использует миллиметровый диапазон, и, как явствует из описания, по основным техническим решениям основывается на российских разработках с откровенным взятием российского образца за "ближайший аналог".
Оригинал взят у коллеги diana_mihailova в Активная радиолокационная головка самонаведения АРГСН-05R противокорабельной ракеты Р-360 "Нептун"
Полезная модель относится к ракетной технике, то есть к системам управления управляемой ракетой, предназначенным для обнаружения и сопровождения движущихся целей и для формирования и выдачи сигналов управления на систему управления ракеты по наведению последней на цель, в частности к активным радиолокационным головкам самонаведения управляемой ракеты, например противокорабельной ракеты Р-360, а именно к радиолокационной головке самонаведения APГC-5R.


Известны зарубежные системы наведения управляемых ракет комбинированного (универсального) типа [1], которые предназначены для поражения как наземных так и воздушных целей класса "воздух-воздух земля", выполненные с применением технологий визуализации и цифровой обработки инверсной сигнатуры цели.
К недостаткам данных систем принадлежит значительная сложность их конструкций и относительно дорогая стоимость.
Вторым аналогом считается радиолокационная головка самонаведения по патенту [2], которая работает в миллиметровом диапазоне волн и обеспечивает поиск и сопровождение наземных целей по дальности и по угловым координатам. Различение целей по дальности в ней выполняется за счет использования нескольких узкополосных фильтров промежуточной частоты, которые обеспечивают достаточно хорошее отношение сигнал-шум на выходе приемного блока. Поиск цели по дальности выполняется с помощью генератора поиска диапазона, который генерирует сигнал с частотой, которая линейно меняется, для модуляции ним сигнала несущей частоты. Поиск цели по азимуту выполняется сканированием антенны в азимутальной плоскости. Специализированный вычислитель, используемый в ней, выполняет выбор элемента "разрешения" по дальности, в котором находится цель, а также слежения цели по дальности и угловым координатам. Стабилизация антенны - индикаторная и выполняется по сигналам, которые снимаются с датчиков тангажа, крена и рыскания ракеты, а также по сигналам, которые снимаются с датчиков угла места, азимута и скорости движения антенны.
Недостатками второго аналога является низкая точность сопровождения целей, что обусловлено высоким уровнем боковых лепестков антенны и плохой стабилизацией антенны, а также низкое разрешение целей по азимуту и малой дальности их обнаружения, а именно до 1,2 км, что обусловлено использованием в этой головке гомодинного способа построения приемо-передающего тракта.
К третьему аналога принадлежит активная радиолокационная головка самонаведения ракеты [3] которая имеет антенну, передатчик, приемное устройство, циркуляционный насос, датчик углового положения антенны в горизонтальной плоскости.
Недостатком третьего аналога является низкая точность сопровождения подвижного наземного объекта за счет учета его угловой скорости и ускорения перемещения.
Наиболее близким техническим решением, как по сути так и по задачам, которые решаются, которое выбрано за ближайший аналог, является радиолокационная головка самонаведения [4], которая имеет каркас, обтекатель, приемный блок, два усилителя мощности, множество излучателей, модуль выходной, который состоит из циркулятора и сумматора, и гиростабилизированный координатор, кварцевый генератор, делитель мощности, целочисленные синтезаторы, модуляторы, умножитель частоты, смеситель, полосовой фильтр, фазовый вращатель, цифровой синтезатор сетки частот, цифровой синтезатор частоты и узел управления, цифровой вычислитель и два модуля питания.
Недостатками ближайшего аналога является, во-первых, возможность слежения за целью только по углу линии визирования цели без учета ее угловой скорости, во-вторых, использование механического гироскопа как устаревшего варианта, а в-третьих, использование гироскопа, ось которого перемещается, что снижает устойчивость движения его ракеты.
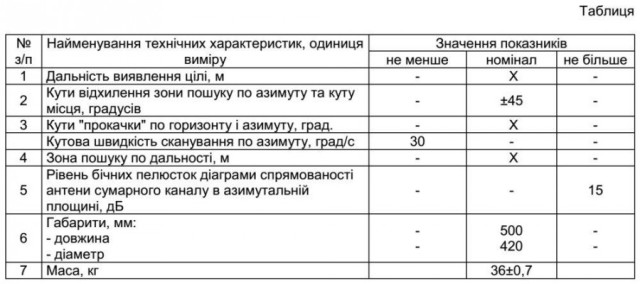
В основу изобретения поставлена задача улучшить технические характеристики головки самонаведения, которая заявляется, а именно увеличить дальность обнаружения целей, увеличить углы отклонения зоны поиска по азимуту и углу места, расширить зону поиска по дальности, увеличить углы "прокачки" по горизонту и азимуту и уменьшить габариты для повышения эффективности наведения ее управляемой ракеты на цель.
Поставленная задача решается за счет того, что радиолокационная головка самонаведения APГC-5R содержит специализированный антенный блок и специализированный синтезатор частот.
Суть полезной модели, а именно радиолокационной головки самонаведения APГC-5R, что каркас, обтекатель, приемный блок, два усилителя мощности, множество излучателей, модуль выходной, состоящий из циркулятора и сумматора, и гиростабилизированный координатор, кварцевый генератор, делитель мощности , целочисленные синтезаторы, модуляторы, умножитель частоты, смеситель, полосовой фильтр, фазовый вращатель, цифровой синтезатор сетки частот, цифровой синтезатор частоты и узел управления, цифровой вычислитель и два модуля питания, заключается в том, что специализированный антенный блок содержит комбинированную антенну в виде антенны микрополосковой и модуля суммарно-разностного, и специализированный синтезатор частот содержит комбинированные целочисленные синтезаторы фиксированной частоты, комбинированный целочисленный синтезатор сетки частот, комбинированный фазокодовый модулятор и комбинированный амплитудный модулятор, обеспечивающих повышение эффективности наведения ее управляемой ракеты на цель.

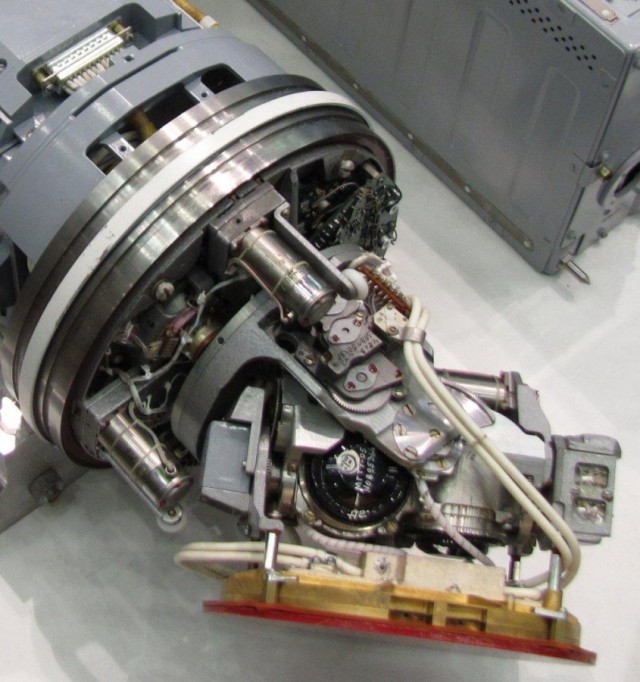
Микрополосковая антенная решетка производства ГП "Гальванотехника" ПАО "Киевский завод "Радар"
Технический результат полезной модели, которая заявляется, достигается путем использования оптимальных схем технических решений ее составляющих, как показано на фигурах 1-3, путем использования оптимального конструктивного решения в комбинированной антенне, а именно задействования микрополосковости в антенне и расширение полосы частот ее излучателей при наличии модуля суммарно-разностного, специализированного антенного блока и путем комбинирования, то есть подбора радиоэлементов в специализированном синтезаторе частот, в частности, применение переключающих диодов в комбинированном фазокодовом модуляторе и комбинированном амплитудном модуляторе и вибростойких конденсаторов в комбинированных целочисленных синтезаторах фиксированной частоты и сетки частот, в результате которых получены оптимальные показатели технических характеристик радиолокационной головки самонаведения APГC-5R, значение которых предоставлено в таблице.
Представленные показатели технических характеристик заявляемой полезной модели достигнуты благодаря использованию метода компенсации собственной скорости управляемой ракеты с помощью эффекта Доплера, задействованного третьим гетеродином fг3 в специализированном синтезаторе частот, в котором внедрение цифрового синтезатора позволяет получить гибкую сетку выходных частот, а достаточно высокая частота сравнения в синтезаторе с фазовой автонастройкой частоты (6.13) обеспечивает необходимый низкий уровень спектральной плотности мощности частотного шума синтезированного сигнала при относительно небольших габаритах синтезатора частот. Также синтезатор (6.13), по сути, является узкополосным фильтром, фильтрующим паразитные составляющие цифрового синтезатора (6.12). Использование данного цифрового синтезатора позволяет получить гибкую сетку выходных частот, а достаточно высокая частота сравнения в синтезаторе с фазовой автонастройкой частоты (6.13) обеспечивает необходимый низкий уровень спектральной плотности мощности частотного шума синтезированного сигнала при относительно небольших габаритах синтезатора частот. Также этот синтезатор, по сути, является узкополосным фильтром, фильтрующий паразитные составляющие цифрового синтезатора.
По конструктивным преимуществам заявляемой полезной модели в ней задействована оптимальная конструкция комбинированной антенны и достигнуто уменьшение ее габаритных размеров (поз. 6 таблицы).
Основные составляющие заявляемой радиолокационной головки самонаведения APГC-5R показаны на фигуре 1, где: 1 - каркас, 2 - обтекатель, 3 - приемный блок, 4 - усилитель мощности, 5 - специализированный антенный блок 5.1 - комбинированная антенна: 5.1.1 - антенна микрополосковая, 5.1.2 - модуль суммарно-разностный, 5.2 - модуль выходной: 5.2.1 - циркуляционный насос, 5.2.2 - сумматор; 5.3 - гиростабилизированный координатор; 6 - специализированный синтезатор частот: 6.1 - кварцевый генератор, 6.2 - делитель мощности, 6.3 - комбинированный целочисленный синтезатор фиксированной частоты fг2, 6.4 - комбинированный целочисленный синтезатор фиксированной частоты fг2, 6.5 - комбинированный фазокодовый модулятор, 6.6 - умножитель частоты, 6.7 - смеситель, 6.8 - полосовой фильтр, 6.9 - комбинированный амплитудный модулятор, 6.10 - фазовый вращатель, 6.11 - цифровой синтезатор fr3, 6.12 - цифровой синтезатор сетки частот fг3, 6.13 - комбинированный целочисленный синтезатор сетки частот fг1, 6.14 узел управления; 7 - цифровой вычислитель, 8 - модуль питания 1 кВт, 9 - модуль питания 500 Вт. На фиг. 2 представлена блок-схема специализированного антенного блока радиолокационной головки самонаведения APГC-5R, а на фиг. 3 - специализированный синтезатор частот радиолокационной головки самонаведения АРГС-5R.
Заявляемая головка самонаведения работает следующим образом (см. Фиг. 1, 2, 3): после запуска управляемой ракеты, которая выводится в заданную точку, от нее поступает команда на включение головки самонаведения в режим сканирования с реализацией обзора по дальности с помощью гиростабилизированного координатора (5.3). При обнаружении цели ее координаты заносятся в память цифрового вычислителя (7), который постоянно работает с управляемой ракетой. Для этого специализированный синтезатор частот формирует зондирующий сигнал, который усиливается усилителями (4), а комбинированная антенна (5.1) специализированного антенного блока его излучает и принимает отраженный сигнал от цели, который усиливается приемным блоком (3) и превращается в видеосигнал, поступающий на аналого -цифровой преобразователь цифрового вычислителя, на входе которого видеосигнал превращается в цифровой вид и далее обрабатывается в цифровом виде. Для каждого элемента дальности проверяется превышение сигнала над порогом и при превышении учитывается угол между осью антенны и направлением цели, указывающий на значение и направление отклонения цели от оси указанной антенны, далее корректируется до совпадения направления управляемой ракеты на цель.
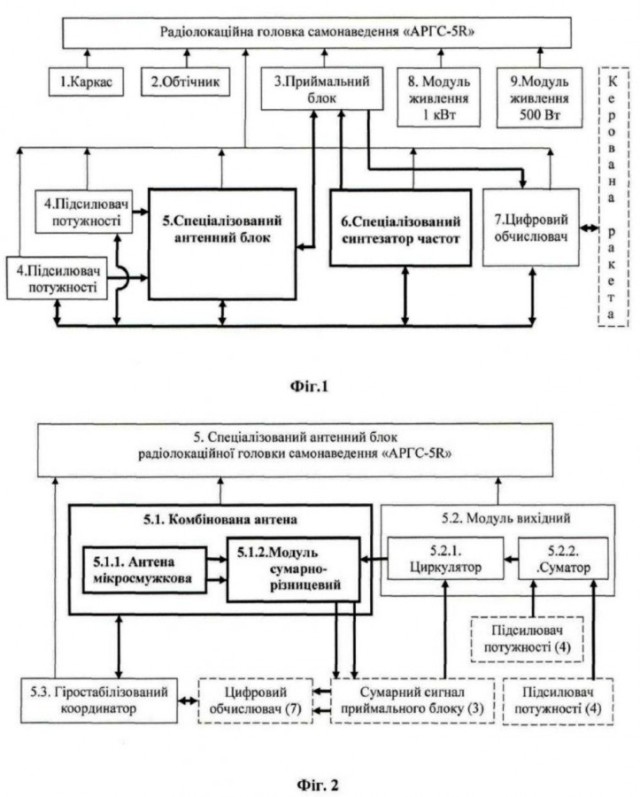
Функционирование заявляемого антенного блока (фиг. 2) выполняется при подаче сигналов, которые усиливаются двумя усилителями мощности (4), на сумматор (5.2.2) модуля выходного (5.2) для сложения. Усиленные и сложенные сигналы поступают в циркуляционный насос (5.2.1) на комбинированную антенну (5.1) для излучения на цель. Отраженный сигнал от цели возвращается на эту антенну, которая наводится на цель с помощью гиростабилизированного координатора (5.3), который имеет связь и управление от цифрового вычислителя (7). Наведение на цель выполняется благодаря тому, что антенна микрополосковая (5.1.1) имеет на выходе два сигнала, которые при прохождении модуля суммарно-разностного (5.1.2) образуют сигналы, поступающие на соответствующие входы приемного блока (3) радиолокационной головки самонаведения APГC-5R и далее на ее цифровой вычислитель.
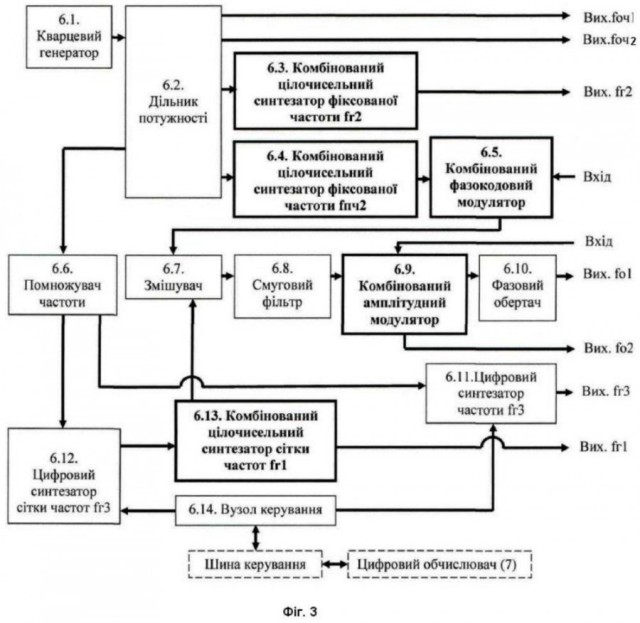
Работа заявляемого специализированного синтезатора частот (фиг. 3) сводится к тому, что сигнал опорного кварцевого генератора (6.1) через активный делитель мощности (6.2) поступает на выходы синтезатора fоч1, fоч2, используемые как тактовые для других систем радиолокационной головки самонаведения на целочисленные синтезаторы с фазовой автонастройкой частоты (6.3) и (6.4), формирующие выходную частоту второго гетеродина fг2 и частоту fпч2, которая равна разнице между частотами зондирующего сигнала и первого гетеродина. Также опорная частота, умноженная на 16 умножителем частоты 6, используется как тактовая для цифровых синтезаторов (6.11) и (6.12), формирующие сетки частот выходного сигнала управляемого гетеродина fг3 и первого гетеродина fг1, разделенную на 50. Сетка частот первого гетеродина формируется комбинированным методом цифрового и косвенного синтеза. Сетка частот, сформированная цифровым синтезатором (6.12), используется как опорная для дальнейшего умножения на 50 в синтезаторе с фазовой автонастройкой выходной частоты первого гетеродина fг1. Сетка частот зондирующего сигнала формируется из частот первого гетеродина и частоты fпч2, которая равна разнице между частотами зондирующего сигнала и первого гетеродина, с помощью смесителя (6.7) и полосового фильтра (6.8). Фазокодовая модуляция выполняется скоростным диодным модулятором (6.5), который работает на фиксированной частоте fпч2, что обеспечивает стабильность параметров модуляции в диапазоне рабочих частот синтезатора. Амплитудная модуляция выполняется скоростным диодным модулятором (6.9) на выходных частотах зондирующего сигнала. Для автоматического фазирования двух каналов усилителя мощности передатчика по выходу fo1 установлен фазовращатель с цифровым управлением. Управление режимами работы синтезатора частот осуществляется по двунаправленной последовательной шине с помощью узла управления (6.14). Синтезатор частот имеет встроенную систему самоконтроля исправности узлов и синтезатора в целом.
Итак, благодаря специализированным составляющим радиолокационной головки самонаведения APГC-5R достигнуто повышение эффективности наведения ее управляемой ракеты на цель.
1. Р. Щербинин. Головки самонаведения перспективных зарубежных управляемых ракет и авиабомб, http://militaryarticle.ru/zarubezhnoe-voennoe-obozrenie/2009-zvo/7734-golovkisamonavedenija-perspektivnyh-zarubezhnyh -аналог.
2. Патент США № 4665401, опубликован 12.05.1987 - аналог.
3. Патент Российской Федерации № 2313054, опубликовано: 20.05.2007 - аналог.
4. Патент Российской Федерации № 2360204, опубликовано: 27.06.2009 - ближайший аналог.
