
Британские инженеры разработали гибридный аппарат для полета и подводного наблюдения. Он состоит из квадрокоптера, который может садиться на воду и выпускать робота, способного плавать под водой и в реальном времени передавать видео оператору. Робот соединен с дроном через кабель, поэтому затем дрон может поднять его обратно и улететь, рассказывают авторы статьи в IEEE Robotics and Automation Letters.
Существуют проекты гибридных дронов, способных перемещаться в воздухе, на воде и под ней. Их можно применять для исследования дна или для долгого выжидания под водой перед воздушной операцией. Проблема этих универсальных дронов заключается как раз в их универсальности: летящему в воздухе дрону не нужна гидроизоляция, а при плавании под водой ему приходится использовать предназначенные для работы в воздухе винты и тратить много энергии на перемещение своего тяжелого корпуса.
Инженеры под руководством Мирко Ковача (Mirko Kovac) из Имперского колледжа Лондона поступили иначе и создали гибрид, состоящий из двух роботов, каждый из которых хорошо приспособлен для своей среды. Основная его часть — это самодельный дрон с конструкцией квадрокоптера. На его опорах закреплено два больших, но легких блока, позволяющих дрону садиться на воду и не тонуть.
На нижней части корпуса дрона закреплена катушка с пятиметровым кабелем, на конце которого висит небольшой подводный робот. Он передвигается под водой, используя механизмы двух типов. Для изменения глубины на краю его жесткого герметичного корпуса есть выступающая полимерная мембрана в форме полусферы. Благодаря ей и воздушному насосу робот может менять объем этой полусферы и тем самым менять свою плавучесть. Для этого в кабеле с дрона помимо проводов есть воздушная трубка. Также у робота есть два отдельных насоса, которые выталкивают воду и позволяют ему двигаться и поворачивать. Кроме того, в роботе установлена камера со светодиодной подсветкой, микроконтроллер для управления и дифференциальный датчик давления для определения глубины.
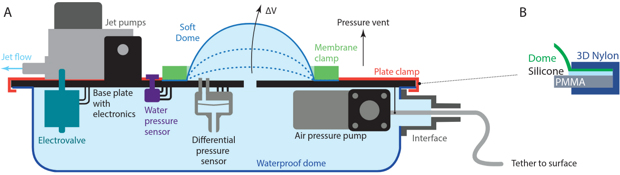 |
| Схема компонентов робота. |
| Источник: Diego Debruyn et al. / IEEE Robotics and Automation Letters, 2020 |
Испытания робота показали, что он может примерно за пять секунд менять глубину на заданную с точностью примерно 2-5 сантиметров и двигаться вперед со скоростью до 0,35 метра в секунду. Помимо этого инженеры успешно испытали всю связку на озере, несколько раз посадив дрон и опустив под воду робота.
Есть также проекты, в которых инженеры используют связку из дрона и наземного робота. В 2018 году китайские инженеры показали, что такая связка более эффективно исследует местность вокруг, а в 2019 японские инженеры создали пару из дрона и робота, в которой дрон залетает на возвышенность, закрепляет там трос, после чего по тросу туда же забирается и наземный робот.
Григорий Копиев
