
Корейские инженеры создали небольшой радиоуправляемый двукрылый орнитоптер, способный проводить в воздухе 8,8 минуты без нагрузки и 7,5 минуты с посадочными опорами и грузом, масса которого аналогична небольшому модулю камеры и сопутствующим компонентам. По второму показателю новый орнитоптер превосходит предыдущего держателя рекорда с сопоставимой массой и размером. Статья о разработке опубликована на arXiv.org.
Исследователи давно пытаются создать миниатюрную альтернативу классическим дронам-мультикоптерам, копирующую птиц и насекомых с крыльями. В 2005 году DARPA запустило программу по разработке небольшого летающего робота для разведки. Создать аппарат, полностью подпадающий под требования программы, не удалось, но компания AeroVironment, участвовавшая в ней, разработала легкий и небольшой орнитоптер Nano Hummingbird. Он имел два крыла и корпус, похожие на колибри, а также небольшую видеокамеру. Несмотря на то, что с момента его создания в 2011 году прошло уже почти десятилетие и было проведено много других разработок в этой области, облегченная версия этого аппарата до сих пор удерживает рекорд продолжительности полета компактного бесхвостого орнитоптера, составляющий 11 минут, причем отрыв от аналогов составляет более чем два раза.
Пак Чхоль-Хун (Hoon Cheol Park) из Университета Конкук и его коллеги создали новый компактный бесхвостый орнитоптер KUBeetle-S, который в нагруженном состоянии превосходит продолжительность полета Nano Hummingbird. Масса аппарата составляет 15,8 граммов, а размах крыла равен 20 сантиметрам. У него есть пара крыльев, состоящих из майларовой пленки, усиленной тонкими углеволоконными стержнями.
Крылья приводятся в движение одним электромотором, раздающим усилие на оба крыла. Для маневров у орнитоптера есть три дополнительных сервопривода: два из них наклоняют верхний блок, на котором держатся крылья, и тем самым наклоняют вектор тяги в нужную сторону, задавая крен и тангаж. А для управления рысканием, то есть поворотом вокруг вертикальной оси, один из сервоприводов отклоняет нижние кромки крыльев в противоположные стороны.
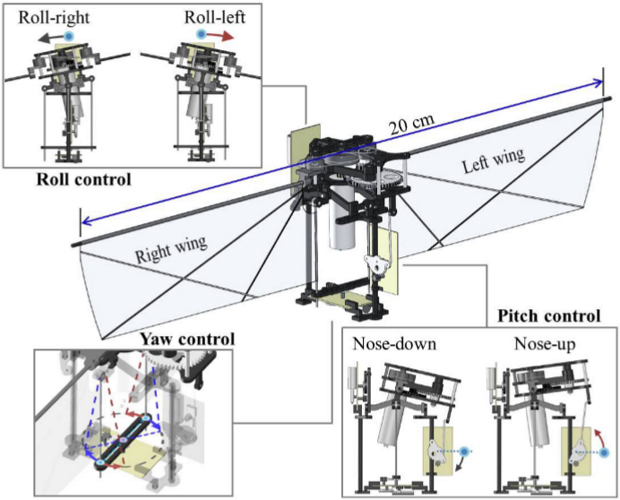 |
| Механизмы наклонения и поворота аппарата. |
| Источник: Hoang Vu Phan et al. / arXiv.org, 2020 |
Также в аппарате установлена плата управления с процессором, инерциальным датчиком (акселерометром и гироскопом) для стабилизации полета, литий-полимерный аккумулятор емкостью 160 миллиампер-часов и два приемопередатчика для получения команд и отправки телеметрии.
Тестовые полеты показали, что робот может стабильно зависать в воздухе, взлетать со скоростью 1,1 метра в секунду и быстро переключаться между зависанием на месте и полетом вбок со скоростью 2,5 метра в секунду. В конфигурации без посадочных опор робот способен стабильно держаться в воздухе 8,8 минуты. Для запуска без посадочных опор его нужно взять в руки, запустить крылья и отпустить.
Инженеры также провели тест с посадочными опорами и полезной нагрузкой общей массой 2,3 грамма, которая, по их расчетам, соответствует массе камеры и сопутствующих компонентов. В такой конфигурации орнитоптер при частоте взмахов 18 герц продержался в воздухе 7,5 минуты, что почти в два раза больше длительности полета Nano Hummingbird в полноценной конфигурации с камерой, посадочными опорами и корпусом, которая составляет четыре минуты.
Компактные орнитоптеры могут послужить не только платформой для съемки, но и в качестве исследовательского инструмента. В 2018 году нидерландские инженеры создали четырехкрылый орнитоптер DelFly и с его помощью экспериментально подтвердили механизм, объясняющий способность дрозофил резко поворачивать во время ухода от хищника.
Григорий Копиев
