Цитата, BorSch сообщ. №7
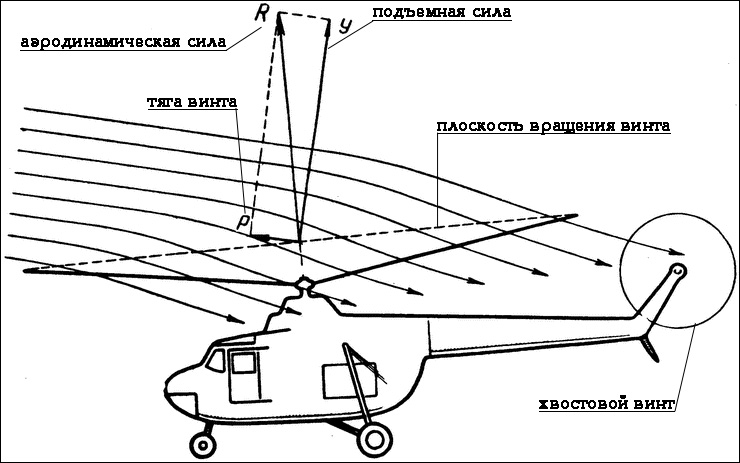
показано, как качаются не лопасти по отдельности, а целиком втулка, к которой они крепятся, то есть наклоняется сама плоскость вращения винта. Это, думается, не есть полноценный автомат перекоса.
Из того как я понимаю работу автомата перекоса, по изменение угла наклона той самой (наклоняемой) детали на валу, в итоге приводит к циклическому изменению угла атаки лопастей на определённом участке (азимуте). Что меняет подъёмную силу на этом участке и вызывает крен ЛА в нужную сторону.
Но
допускаю, что может быть и не так там устроено.
Главное, что это точно не просто винт на валу. В таком случае полёт длился бы не долго. Это я знаю из эксплуатации дронов-игрушек дома.
Можно, меняя обороты, изменять подъёмную силу на разных винтах конвертоплана, вызывая крен в нужную сторону, но это всё очень инертно, не точно, долго. Попробуйте быстро установить нужные обороты просто в машине, давя на педаль газа. Менять общий шаг можно быстрее и точнее, но надо будет менять и обороты тоже. Может компьютеры или автоматика научатся это делать быстро, но руками это муторно.
Это, сразу, как бы ответ на вопрос про Як-52. Из инструктажа помню, что есть определённые режимы работы двигателя, которым соответствует число оборотов и шаг винта. Допустим, обе ручки от себя это минимальный шаг и более 100% оборотов (от номинала). Т.е. взлётный режим.
С минимальным же шагом винта совершается посадка. Меняются только обороты. На самый минимум устанавливается только на 1-2 секунды, пока выпускаешь закрылки. А вообще на снижении обороты около 40% Точно уже не помню. Главное, чтобы двигатель не "хлопал" и работал устойчиво. А то заглохнет. Один раз такое видел. Весь высший пилотаж тоже на минимальных оборотах совершается. Всё это режим наибольшей безопасности. Т.к. двигателю легко крутить винт с малым шагом. Вот когда пилотаж простой, там подбирается больший шаг винта и снижаются обороты. Для экономии топлива. Двигатель при этом работает как бы с большей вибрацией, чувствуется, что ему тяжелее. Полагаю ,что на максимальных оборотах нельзя ставить максимальный шаг, т.к. будет очень большая нагрузка на двигатель и редуктор, а максимальный шаг с минимальными оборотами может привести к остановке двигателя. Т.к. не хватит мощности стабильно вращать винт.
Именно поэтому я делаю вывод, что оспрей и райдер не могут эффективно управляться, если у них нет того, что работает как автомат перекоса. Т.е. управлять надёжно меняя только шаг винта это очень не надёжно. Это инертность и угроза стабильной работе двигателей. Либо это будут изменения в урезанном диапазоне, что как раз и ограничит маневренность. Требования к пилотам будут значительно более высокие. Это как заезжать в гараж, управляя тягой автомобиля (дрифт), а не рулем. Конечно можно, но дико.
На одном американском форуме прочитал, что райдеру хотели впихнуть какие-то независимые друг от друга актуаторы на каждую лопасть, вместо автомата перекоса (swashplate), но это вроде как осталось задумкой. Форум до конца не читал, может они что-то придумали, чего не хотят показать. Но, повторяю, не в этом (для меня) суть, а в том, что обязательно есть управление подъёмной силой через угол атаки лопастей. Т.к. это быстрее и точнее.
Вот как раз в этом и ответ на второй пост.
Цитата, BorSch сообщ. №8
К 1981 году программа была завершена. XH-59A доказал базовую концепцию опережающей лопасти, достигнув скорости полета 240 узлов без использования крыла, недоступной вертолетам. Кроме того, с жесткими роторами и отсутствием рулевого винта, в низкоскоростном полете пилоты-испытатели считали ABC превосходящим обычные вертолеты.
Ну я это так и понимаю, через управление подъёмной силой с помощью циклического шага. Так же, как и на наших вертолётах соосной схемы. Именно это я читаю в приведённой цитате. Жесткий ротор или мягкий - не в этом суть. Угол атаки лопастей всё-равно меняется. Я так это понимаю.










/x%203.jpg)
/x%204.jpg)
/rotor%20lift%20alt.jpg)