
Американские инженеры показали в действии прототип системы для прямой связи между подводными и летательными аппаратами. Она состоит из подводного акустического излучателя, звуковые волны от которого вызывают колебания поверхности воды, и радара, который считывает эти колебания и фильтрует их от колебаний, вызванных естественными волнами на поверхности воды. Разработчики успешно испытали прототип системы в бассейне с плавающими людьми и передатчиком, размещенным на глубине 3,5 метра. Разработка была представлена на конференции SIGCOMM 2018.
Связь с подводными лодками и исследовательскими подводными аппаратами представляет собой большую проблему. Радиосигналы с наземных станций, спутников или самолетов быстро поглощаются водой и не могут проникать глубоко под поверхность воды, а акустические сигналы, относительно далеко распространяющиеся под водой, практически не переходят через границу воды и воздуха. Из-за этого для связи с подводными аппаратами используются промежуточные устройства, которые располагаются на поверхности воды или под ней, но связаны через кабель с поверхностью, и преобразуют акустические сигналы в радио- или электрические сигналы и наоборот. Такой способ обладает множеством недостатков. К примеру, он слабо применим для связи с подводными лодками, потому что для этого необходимо создать огромную сеть из ретрансляторов в океанах.
Франческо Тонолини (Francesco Tonolini) и Фадель Адиб (Fadel Adib) из Массачусетского технологического института создали систему связи, позволяющую подводным аппаратам «общаться» с летательными аппаратами напрямую через границу между водой и воздухом и основанную на особенностях взаимодействия обоих типов сигналов с этой границей. Система состоит из акустического передатчика под водой и радара над водой. Акустический передатчик излучает волны на частотах от 100 до 200 герц, которые распространяются к поверхности воды. При достижении поверхности воды волны вызывают периодические колебания уровня воды на несколько единиц или десятков микрометров.
Измерить такие изменения уровня воды напрямую довольно затруднительно. Вместо этого инженеры использовали радар, работающий в миллиметровом диапазоне, и решили измерять не время пролета сигнала, а периодические изменения в фазе сигнала, происходящие при отражении от колеблющейся воды.
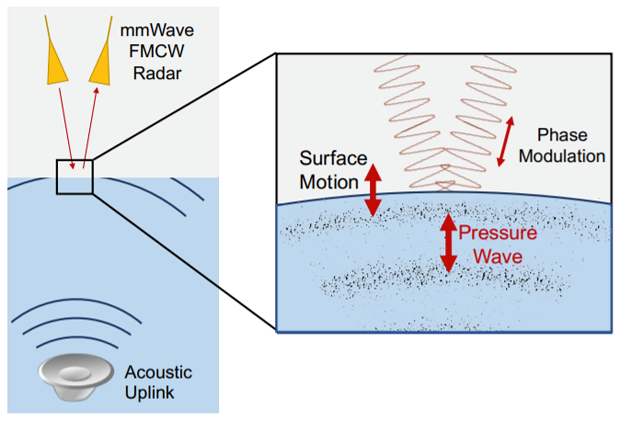 |
| Принцип передачи сигнала на границе двух сред. |
| Источник: Francesco Tonolini, Fadel Adib / SIGCOMM 2018 |
Радар излучает сигнал с частотной модуляцией с несущей частотой 60 гигагерц. Разработчики выбрали эту частоту, потому что такой сигнал достаточно сильно меняется от колебаний, вызванных акустическим сигналом передатчика, но не приводит к хаотическому изменению частоты от естественных волн. Поскольку естественные волны имеют частоту от десятых долей до единиц герц, их достаточно просто отфильтровать и выделить на их фоне сигнал передатчика с частотой в 100-200 герц. Для кодирования информации инженеры выбрали метод мультиплексирования с ортогональным частотным разделением каналов (OFDM), при котором сигнал передается одновременно на нескольких поднесущих частотах. Эта же схема кодирования используется в стандартах связи Wi-Fi и LTE. Эксперименты показали, что скорость передачи сигнала составляет до 400 бит в секунду.
Инженеры провели серию испытаний в емкости с водой, а также в бассейне с глубиной 3,5 метра, в котором также плавали люди, создающие волны. Испытания показали, что система способна работать при волнах с амплитудой 8 сантиметров (суммарной разницей высоты 16 сантиметров).
Разработчики отмечают, что пока у системы есть несколько важных недостатков. Использованная ими схема позволяет проводить только односторонние сеансы связи. Кроме того, пока она не может работать в условиях больших волн. Инженеры предполагают, что это ограничение можно частично устранить, оборудовав акустический передатчик и радар системой отслеживания волн на поверхности, которая позволит в реальном времени подстраивать сигналы под условия на поверхности воды. Наконец, система требует, чтобы радар находился практически вертикально над передатчиком.
В 2016 году Министерство обороны России начало развертывание подводной системы гидроакустического обнаружения и наблюдения «Гармония». Она состоит из устанавливаемых на дне роботов, которые проводят пассивную или активную гидроакустическую разведку и периодически выпускают на поверхность буи для передачи данных на командный пункт.
Григорий Копиев
