
ТАСС рассказывает о том, какие российские роботы уже бороздят морские глубины, а какие еще готовятся к покорению морей
Военно-морской флот (ВМФ) России наращивает свои возможности не только за счет надводных и подводных кораблей различных рангов, но и с помощью новейших робототехнических комплексов. О том, какие российские роботы уже бороздят морские глубины, а какие еще готовятся к покорению морей, — в материале ТАСС ко Дню ВМФ.
Властелин морей
О создании океанской многоцелевой системы "Посейдон" стало известно еще несколько лет назад. Правда, тогда она носила имя "Статус-6", а информация о ней была неофициальной.
В феврале этого года глава страны Владимир Путин во время послания Федеральному собранию сообщил о том, что в России разрабатывается беспилотный подводный аппарат с ядерной энергетической установкой. Позже главком ВМФ Владимир Королев уточнил, что это оружие позволит флоту решать широкий спектр задач в акваториях рядом с территорией противника, а система наведения даст возможность аппаратам самостоятельно выходить к цели с высокой точностью.
Теперь Россия готова защищать себя в морских глубинах не только стратегическими и многоцелевыми подводными лодками, но и при помощи принципиально нового вида морского подводного оружия, основанного на применении беспилотных подводных аппаратов. В ходе народного голосования на сайте Минобороны эта уникальная система получила свое нынешнее имя — "Посейдон".
Уже проведены испытания основного элемента беспилотника — ядерной энергетической установки, благодаря которой аппарат сможет двигаться на глубине свыше 1 км на большой скорости, оставаясь незамеченным. Позднее в Минобороны уточнили, что этот "властелин морей" сможет бороться с авианосцами противника и поражать его береговые объекты на межконтинентальной дальности.
"Главным преимуществом "Посейдона" является практически стопроцентная неуязвимость от средств противодействия противника. Уникальные возможности аппарата позволят ВМФ бороться с авианосными и корабельными ударными группами вероятного противника на любых направлениях океанского театра военных действий, поражать объекты береговой инфраструктуры на межконтинентальной дальности", — сообщили в российском военном ведомстве.
Неуязвимость "Посейдона" достигается за счет большой глубины погружения, высокой скорости хода, а также непрогнозируемого для противника маршрута движения к цели.
Титановый "Лошарик"
Атомная глубоководная станция (АС-12), созданная конструкторами Санкт-Петербургского морского бюро машиностроения "Малахит" в конце 1980-х годов, получила свое "несерьезное" прозвище в честь героя одноименного мультфильма — лошадки из шариков. Поводом для этого послужила специфическая конструкция незаметного героя глубин: прочный корпус АС-12, по данным открытых источников, состоит из нескольких титановых сфер, соединенных друг с другом и покрытых легким корпусом. Именно такая форма позволяет станции опускаться на глубину до 6 тыс. м, не рискуя быть раздавленной толщей воды.
АС-12 относится к обитаемым подводным аппаратам. Его носителем в открытых источниках указывается АПЛ специального назначения "Оренбург", переделанная из проекта 667БДР "Кальмар".
В 2012 году "Лошарик" принял участие в экспедиции "Севморгео" для уточнения высокоширотной границы континентального шельфа в Арктике. Экипаж АС-12 помогал ученым на ледоколах "Капитан Драницын" и "Диксон" собирать образцы грунта и донных пород на шельфе Менделеева.
Данных о каком-либо вооружении "Лошарика" до сих пор нет. Этот аппарат позиционируется как научно-исследовательский.
"Клавесины" в море
Необитаемый подводный аппарат "Клавесин-2Р-ПМ", предназначенный для поисковых операций и исследований, создают для флота специалисты ЦКБ "Рубин". Гендиректор конструкторского бюро Игорь Вильнит ранее рассказывал в интервью ТАСС, что этого робота должны испытать в Черном море.
 |
| Необитаемый подводный аппарат "Клавесин-2Р-ПМ". |
| Источник: ckb-rubin.ru |
"Это первый образец, который мы создали по заданию военных. Он уже прошел первые испытания, бассейновые, парные испытания оборудования", — рассказывал Вильнит.
По его словам, это "большой аппарат с обширными возможностями". В будущем предполагается целая серия подобных аппаратов.
Игорь Вильнит
гендиректор ЦКБ "Рубин"
Помимо обзорно-поисковых функций, "Клавесины" будут решать задачи научно-исследовательского изучения Мирового океана в глубоководных районах. Глубина погружения аппарата достигает 6 тыс. м, при этом у него нет ограничений по району плавания.
"Юнона" и "Амулет"
Мобильный автономный необитаемый подводный аппарат "Юнона" впервые был представлен широкой общественности в 2015 году. Он предназначен для обследования подводной обстановки, изучения, сбора и передачи информации, работы на арктическом шельфе, решения поисковых задач и обеспечения спасательных операций.
Также "Юнона" сможет определять рельеф морского дна, исследовать расположение температурных границ в водной толще и помогать картографам. Этот робот рассчитан на глубину до 1000 м, его автономность достигает 6 часов. Длина "Юноны" — 2,9 м, диаметр — 0,2 м, а масса составляет 80 кг.
 |
| Мобильный автономный необитаемый подводный аппарат "Юнона". |
| Источник: © ЦКБ "Рубин" |
"Есть зарубежные аналоги, но у нашего аппарата в разы меньше цена. Комплектующие на 100% отечественные. "Рубин" в данном случае выступает не только как проектировщик, но и как изготовитель этого аппарата", — рассказывал ТАСС Игорь Вильнит.
По его словам, аппаратом заинтересовались не только российские военные, но и зарубежные заказчики.
Младший "брат" "Юноны" — автономный необитаемый подводный аппарат "Амулет". В его задачи входит проведение поисковых и исследовательских операций, а также наблюдение за показателями подводной среды: температурой, давлением и скоростью распространения звука.
Длина аппарата — 1,6 м, вес — 25 кг, диаметр — 16 см. Предельная глубина погружения аппарата составляет 50 м, максимальная скорость подводного хода — 5,4 км/ч, дальность действия — 15 км.
Имитатор "Суррогат"
Также для ВМФ РФ создается робот, способный имитировать любую подлодку. Специалисты ЦКБ "Рубин" уже разработали концепт-проект морского роботизированного комплекса "Суррогат" для проведения учений ВМФ. Как ранее рассказывали ТАСС в конструкторском бюро, с военными моряками ведутся консультации по поводу этого проекта.
"Сравнительно большие размеры (длина около 17 м) и возможность нести буксируемые антенны различного назначения позволят реалистично воспроизвести физические поля подлодки противника — акустическое и электромагнитное", — отмечали в ЦКБ "Рубин".
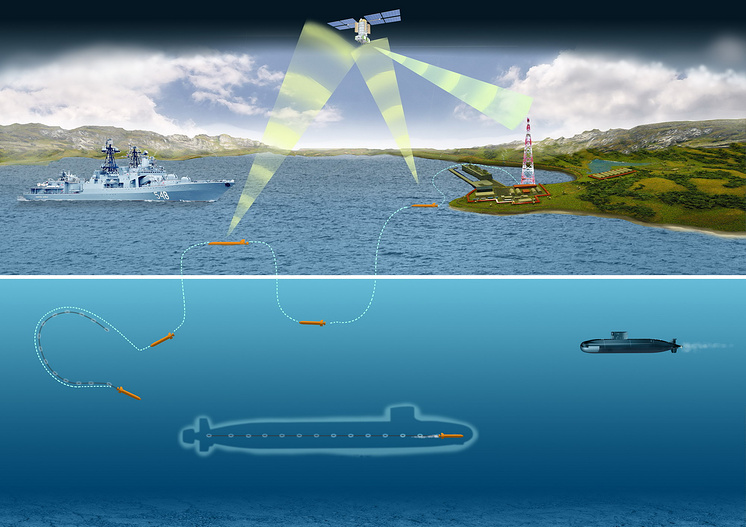 |
| Схема работы роботизированного комплекса "Суррогат". |
| Источник: © ЦКБ "Рубин" |
"Суррогат" оснащен литий-ионной батареей. Этот имитатор подводной лодки способен обеспечивать учения длительностью до 15–16 часов, причем все это время он будет воспроизводить маневрирование подлодки противника, в том числе на больших скоростях хода.
Модульная конструкция имитатора позволит менять его функциональность: "Суррогат" сможет имитировать как неатомную, так и атомную подводную лодку, а также вести картографирование местности и разведку.
Создание такого робота продиктовано практическими соображениями: сегодня для учений или испытаний необходимо привлекать боевые подлодки, отрывая их от решения основных задач. Использование необитаемого имитатора позволит избежать этого и снизит стоимость учений, кроме того, "безэкипажная" лодка уменьшает риски, сохраняя реалистичность.
Игорь Вильнит
гендиректор ЦКБ "Рубин"
Водоизмещение автономной необитаемой подводной лодки "Суррогат" составит около 40 т, дальность плавания — около 600 миль при скорости 5 узлов, максимальная скорость — свыше 24 узлов, предельная глубина погружения — 600 м.
Богатства Арктики
Для освоения арктического шельфа предназначен проект "Айсберг", которым занимаются ЦКБ "Рубин" и Фонд перспективных исследований (ФПИ). Он состоит из пяти взаимосвязанных подпроектов, которые в комплексе дадут возможность создать целый подводный "город".
Это комплекс подводной сейсморазведки, подводный энергетический комплекс, буровая установка, подводный транспортно-монтажный сервисный комплекс катамаранного типа и особая система безопасности, предусматривающая в том числе и создание робототехнического комплекса с охранными функциями.
Как рассказывал в интервью ТАСС главный конструктор ЦКБ "Рубин" Евгений Торопов, работа, предусмотренная техническим заданием, уже завершена.
"В рамках проекта "Айсберг" был разработан аванпроект роботизированного подводного бурового комплекса. Он состоит из нескольких модулей — модуля бурения, подготовки бурового раствора, очистки. Все это объединено в единый подводный "город". Инструменты, трубы, расходные материалы, буровой раствор — все это применяется под водой в автоматическом режиме, проводится лишь удаленный мониторинг с берега", — рассказывал конструктор.
Исследования глубин
В целом проекты подводных исследовательских роботов, которые разрабатываются сегодня в России, можно условно разделить на две составляющие. Это классические автономные необитаемые подводные аппараты (АНПА) различных классов и автономные необитаемые подводные аппараты глайдерного типа.
Как рассказывал в интервью ТАСС начальник Главного научно-исследовательского испытательного центра робототехники МО РФ (ГНИИЦ) Сергей Попов, "за последнее время появились, оформились, получили признание и наработали большой научно-промышленный потенциал новые классы подводных роботов, в том числе и подводные планеры с гидростатическим принципом движения".
По его словам, долговременный мониторинг в определенном районе, скрытные перемещения, создание временной распределенной наблюдательной сети "должны решаться группой аппаратов, причем во взаимодействии с техническими средствами других типов и родов".
Отдельное направление представляют собой микророботы — исследовательские аппараты "карманного" формата, которые при весе 8–10 кг могут выполнять миссии до 4 часов и на расстоянии до 4 км от точки запуска. Запускать их можно прямо под лед с рук, куда они и будут возвращаться. В настоящее время такие аппараты уже разработаны и проходят первые испытания.
Подготовила Анна Юдина

