
Развитие робототехники в последние годы является одним из приоритетных направлений в гражданской и в военной отраслях науки. Различные машины заменили человека во многих сферах производства, роботизированные машины активно помогают и в решении военных задач. О том, какие роботы могут появиться в ближайшее время в российской армии, зачем научили стрелять гражданского робота F.E.D.O.R. и стоит ли ожидать восстания машин, которым пугают фантасты, в интервью обозревателю "Интерфакса" Илье Морозову рассказали заместитель генерального директора Фонда перспективных исследований (ФПИ) Игорь Денисов и заместитель руководителя Национального центра развития технологий и базовых элементов робототехники ФПИ Алексей Кононов.
- Расскажите, пожалуйста, как в России обстоят дела с развитием робототехники?
Алексей Кононов: Роботы сегодня - это уже не экзотика. Более того, многие образцы, тот же наш спасатель F.E.D.O.R. - это воплощение фантастических представлений, имевших место несколько десятилетий назад.
Они уже становятся реальностью. Есть программируемые манипуляторы на опасных производствах, роботы поднимают и транспортируют неподъемные для человека грузы: существуют целые логистические склады без участия человека. Здесь также отрабатываются отдельные технологии по управлению: автоматическая прокладка маршрута, элементы обучения и прочее, а роль человека сводится к составлению программ и контролю.
- А как обстоит ситуация с боевыми роботами?
Игорь Денисов: Боевых роботов, самостоятельно принимающих решения, сегодня не существует. Эта проблема будет решена с появлением продвинутых алгоритмов искусственного интеллекта, а самое главное с решением проблемы распознавания "свой - чужой", с которой пока никто не справился.
Например, в американской дистанционно управляемой воздушной платформе Predator, которую относят к боевым роботам, вопросы применения вооружения, команда о пуске ракет и другие ответственные решения - зона ответственности человека-оператора.
- На что сейчас способны российские боевые роботы?
И.Денисов: Сегодня военные роботы – это, прежде всего, машины обеспечения – транспортного, разведывательного, инженерного и т.д. Сейчас появляются роботы, пока управляемые дистанционно, на которых отрабатываются режимы автономного движения по маршруту. Например, роботы для разминирования, которые постоянно совершенствуются. Это же касается манипуляторов для опасных грузов.
Если раньше это все отдавалось на откуп оператору и его умению правильно управлять джойстиком, то сейчас достаточно указать точку захвата и машина сможет сделать все сама.
Если говорить о таких роботах, то здесь соперничество идет на конкурентоспособном уровне. В области роботов обеспечения наша страна достаточно конкурентоспособна, а в некоторых сферах мы даже не видели у иностранных коллег реализованных на практике решений.
- На каком этапе идет работа над созданием систем искусственного интеллекта для роботов?
А.Кононов: Если проводить аналогии с жизнью человека, то сейчас работа в этом направлении находится на уровне школьного детства. Многое сделано, было много попыток, но давайте посмотрим на то, что есть сейчас. Один из наиболее характерных примеров – общение человека с техникой на естественном языке. Системы распознавания речи у Google и Apple (всем известная Siri) базируются на том, что сам распознаватель находится на удаленном сервере.
Если попытаться так же обратиться к роботу, находящемуся в экстремальных условиях, такая система вряд ли будет работоспособной, потому что связь с сервером всегда может быть оборвана. Нужно, чтобы данные были здесь и сейчас. Это простейший пример, который показывает, что до воплощения этих мечтаний достаточно далеко.
Хотя прогресс есть, отдельные элементы появляются. Есть примеры, когда система управления обучается жестам человека, когда роботы запоминают наиболее часто выполняемые действия и потом уже при малейшем намеке сами выполняют их. Но сама теория систем с самообучением достаточно сырая и пока не достигла уровня, который мог бы позволить отнести ее к прикладным наукам.
Прогнозировать что-то конкретное по срокам в этом вопросе, особенно, если касаться военной темы, нужно с большой осторожностью.
- И каковы перспективы?
И.Денисов: Тема искусственного интеллекта уже давно существует. Здесь важно определение искусственного интеллекта. До настоящего времени единого понимания нет. То, о чем сегодня принято рассказывать, относится к системам, обученным навыкам в определенном диапазоне условий. Это может быть распознавание изображений, голоса или игра в шахматы, или игра Го. Всегда есть какое-то "или". Но если рассматривать искусственный интеллект в сопоставлении с человеком, то тут надо говорить о возможности системы самой поставить себе задачу, определить критерии ее решения и решить. Подходы к решению этой проблемы, дающих требуемый для практики результат, на сегодняшний день глубоко не проработаны.
То, что сегодня называют искусственным интеллектом - это алгоритмы, основанные, как правило, на нейросетях, когда машину обучают хорошо выполнять одну и ту же задачу. Например, играть в Го, быстрее человека распознавать изображение и так далее. Сегодняшние алгоритмы в этом направлении уже работают гораздо эффективнее человека: как известно, машина уже обыграла человека в Го.
Сегодня на повестке дня создание систем, которые могут иметь возможность самообучаться все время своего активного существования: чем больше работает автомат, тем умнее он становится. Но о замене интеллекта человека речи сегодня не идет, точку здесь ставить еще очень рано.
- В недавнем интервью "Интерфаксу" вице-премьер Дмитрий Рогозин упомянул робот "Нерехта" в числе перспективных разработок отечественного ОПК. На каком этапе находятся работы по этому комплексу?
И.Денисов: "Нерехта" - это разработка ОАО Завод имени В. А. Дегтярева в кооперации с АО "ВНИИ "Сигнал". В настоящее время проведена модернизация боевого модуля, претерпели ряд изменений алгоритмы управления платформой. Говорить о появлении конечного изделия нельзя, работа находится на этапе уточнения оптимального решения.
"Нерехта" сегодня гораздо совершеннее той платформы, которая была 2-3 года назад. Повысилась автономность, появились дополнительные режимы работы, позволяющие помогать оператору в сложных моментах, связанных с движением и управлением оружием. Она стала точнее, появился модуль для установки гранатометного вооружения, а не только пулемета, как раньше.
- Уже есть заказы от военных?
И.Денисов: На сегодняшний день, насколько мне известно, ряд заказчиков со стороны министерства обороны планирует использовать "Нерехту" для охраны заданного периметра.
В дальнейшем, по мере роста автономности, роста энергетических и интеллектуальных характеристик, ей будут ставить и другие задачи, когда она сможет работать не на какой-то конкретной площади, а действовать вместе с группой военнослужащих.
- Ведется ли разработка робота "Нерехта-2"?
И.Денисов: Ведется. По сути, мы сегодня находимся на уровне становления программы развития наземной робототехники в классе "Нерехта". Это класс, который позволит создать системы, действующие, в недалеком будущем, в кооперации с человеком. Есть много задач, решать которые предназначена робототехника, они связаны с выводом человека из зоны поражения, с усилением его интеллектуальных и физических возможностей и так далее. Все эти задачи мы группируем в программе работ по созданию многофункциональной наземной мобильной платформы для отработки ключевых технологий робототехники, которая приведет к созданию робота, умеющего действовать в составе перспективного тактического подразделения.
 |
| Многофункциональный робототехнический комплекс обеспечения боевых действий "Нерехта" |
| Источник: Алексей Хомяков / /www.vestnik-rm.ru |
- Чем "Нерехта-2" будет отличаться от предшественника?
И.Денисов: Как я сказал, это не законченное изделие, а платформа, на которой будут отрабатываться различные технологии, в частности, технического зрения и связанного с ним алгоритма распознавания препятствий и автоматического движения в условиях помех: дыма, дождя, снега, и многое другое.
Вторая задача - отработка новых систем энергообеспечения. Сегодня в России существуют достаточно интересные решения, связанные с электродвижением. Это не только системы гибридных приводов или новых аккумуляторов, но и новые типы электродвигателей с высокими удельными характеристиками.
На новой платформе применяется модульный принцип построения, определяются единые стандарты по управлению, единые посадочные места.
Немаловажная вещь - каналы управления. Сегодня единой системы обмена информацией среди роботов не существует: каждый раз приходится решать задачи электромагнитной совместимости. Эта задача тоже будет решаться.
"Нерехта-2", в отличие от предшественницы, будет иметь в своем составе компонент, который позволит работать ей вместе с человеком. Это приборы и интерфейсы, вмонтированные в боевую экипировку, которые помогут эффективнее управлять роботом на поле боя, где пользоваться джойстиком и компьютером, как сегодня, невозможно. Поэтому нужно отработать технологию, которая позволит человеку ставить задачу роботу, не отвлекаясь от выполнения текущих задач.
- Как планируется реализовать эти функции управления?
И.Денисов: Это и речевое управление с использованием ларингофона - естественно, никто кричать команды на поле боя не будет, это и управление жестами. Кроме того, мы говорим о том, что перспективные системы прицеливания индивидуального стрелкового оружия будут позволять роботу наблюдать за полем боя глазами оператора-человека, и тогда он сможет выступать помощником человека при решении задач по поражению целей, которые солдат из своего личного оружия поразить не может или не успевает, а робот - сможет.
Следующее отличие "Нерехты-2" - наличие в ее составе легких воздушных платформ вертикального взлета. Это повысит эффективность работы системы в целом. По сути, "Нерехта-2" - это группа роботизированных комплексов, которые будут объединены единой системой управления, подчиненной человеку-оператору, который сможет выбирать: оставаться ли ему в тылу и управлять дистанционно, или он будет находиться с роботом на одной линии для выполнения задач обеспечения, например, транспортировки боеприпасов или других грузов и так далее. При этом человек может пользоваться тяжелым вооружением платформы, наблюдать за обстановкой "глазами" беспилотников, тем самым существенно расширяя свои физические и боевые возможности.
- Какие еще роботизированные комплексы для военных разрабатываются при участии ФПИ?
И.Денисов: У нас есть воздушная платформа высокой автономности с шифром "Сова". По сути это атмосферный спутник, аппарат, предназначенный для сверхдлительного полета на больших высотах и обеспечения потребителей необходимой информацией дистанционного зондирования, либо для ретрансляции данных. Этот атмосферный спутник отлетал у нас в прошлом году, сейчас готовится полет прототипа с размахом крыльев 28 метров. Предполагается, что этот аппарат сможет находиться в воздухе не менее полугода и решать массу задач на уровне космических систем, оставаясь возвращаемой платформой, следовательно, обслуживаемой и адаптируемой, а значит менее дорогостоящей в использовании, по сравнению с орбитальными спутниками.
 |
| Атмосферный спутник "Сова" |
| Источник: Фонд перспективных исследований |
Вторая воздушная платформа разрабатывается для отработки технологий скоростного движения. Это очень быстрый аппарат, основной акцент мы делаем на возможности отработки технологий перспективных двигателей, которые позволят создать высокоскоростные аппараты, которые смогут работать на больших расстояниях.
Есть еще два типа аппарата, один из них будет разрабатываться в рамках недавно объявленного нами конкурса "Вертикальный взлет". Цель - найти лучшее решение, связанное с обеспечением энергетически выгодного вертикального взлета, посадки и скоростного горизонтального полета, это нечто среднее между самолетом и вертолетом.
Сегодня в "железе" этой платформы нет, но требования к ней мы готовим.
Самая маленькая система, которую мы делаем, имеет шифр "Аэробот", где у нас сгруппирован ряд работ и конкурсов. В прошлом году совместно с Минобороны мы провели соревнования по "дрон-биатлону". В рамках конкурсов мы будем искать коллективы, способные разработать алгоритмы для малогабаритных коптеров, способных в автономном режиме совершать скоростные полеты в сложных условиях. Условно говоря, влететь в форточку и вылететь в дверь из комнаты, попасть в другую и найти выход. Или быстро пролететь по лесу, не задевая деревьев. Разработчиков таких коптерных систем очень много, а вот датчики к ним - это непростой вопрос. Реализовать алгоритмы автономного полета на низкопроизводительных платформах достаточно проблематично. Но такие работы у нас ведутся, с помощью этих коптеров мы решаем и задачи поведения аппаратов в группе, выявления целей и наведения, повышения автономности.
Если говорить о наземных системах, у нас есть две платформы. Одну из них образно назовем "Нерехта-2", вторая - известная антропоморфная платформа F.E.D.O.R. Если на первой отрабатываются боевые, ударные технологии, то вторая связана с отработкой систем технического зрения, приводов, тонкой моторики и возможности управления в копирующем режиме.
Также у нас проработаны две морские платформы. Одна из них предназначена для отработки перспективных подводных энергетических систем, систем связи и навигации. Целевая функция - создание платформы, которая сможет без использования ядерной энергии на обычных двигателях пройти несколько тысяч километров под водой без всплытия. Это достаточно серьезная задача.
Еще одна подводная платформа, с шифром "Витязь", должна обеспечить возможность решения задач на всех глубинах мирового океана, включая Марианскую впадину. По сути, это робот, на котором мы хотим отработать технологию построения аппаратов для дистанционного зондирования дна мирового океана. Решение этой задачи важно и военным, и гражданским специалистам.
- "Витязь" уже создан?
И.Денисов: Закладка аппарата произойдет ориентировочно летом. Это достаточно большой аппарат, по сути, это целый комплекс: на таких глубинах, для которых он предназначен, ключевой задачей является передача информации в реальном времени от основных датчиков, поэтому в его составе есть базовая станция-ретранслятор, которая ставится в районе "приземления" аппарата и обеспечивает его связь с поверхностью.
- Есть ли планы создать танк-робот на платформе "Армата"?
И.Денисов: Это больше вопрос "Уралвагонзаводу", но Т-14 - это уникальная платформа, которая по своей сути является во многом роботизированной. Изоляция экипажа в отдельной капсуле - решение одной этой проблемы невозможно без использования элементов робототехники.
А.Кононов: Т-14 в полной мере олицетворяет направление роботизации по созданию экипажных/безэкипажных машин с постепенным сокращением находящихся внутри людей. Она уже во многом приспособлена для этого: это и модульность, и возможность функционирования при сокращенном составе экипажа, а в последствии, и в безэкипажном варианте. Это оснащение танка системами из области последних достижений в сфере технического зрения и других областей техники.
Роботизация позволит повысить боевую мощь танка: без людей появляется возможность, например, увеличить боекомплект и скорострельность за счет установки другого автомата заряжания, снизить вес из-за других требований к бронированию. Но это же создает и другие сложности. Например, нужно иное орудие с большим ресурсом, так как танк-робот может чаще и быстрее стрелять, соответственно появляются новые требования к материалам. Это многоплановая и творческая задача.
В целом - это очень перспективная платформа. Как она покажет себя дальше, станет ясно в ходе дальнейших испытаний и эксплуатации.
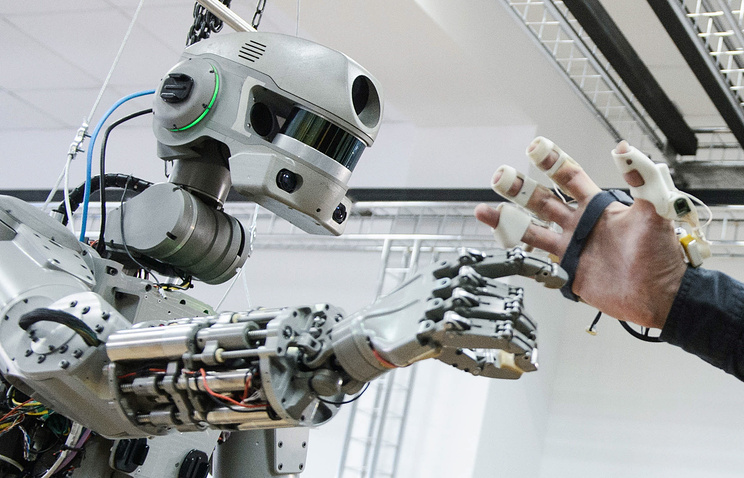
- Недавно показали, как человекоподобный робот F.E.D.O.R. стреляет с двух рук из пистолетов. Есть ли перспективы его военного применения?
И.Денисов: Ранее мы говорили, что главное в роботе - это интеллект, программа. Цена входа невелика - нужны головы, нужен коллектив, знающий физику, математику и химию, программирование. А вот чтобы сделать прототип робота в металле, например, подводного, где используются стойкие к коррозии прочные материалы, дорогие системы связи и энерогообеспечения, нужно много материальных и временных ресурсов, поэтому на примере робота F.E.D.O.R. мы договорились с министерством образования и науки о взаимодействии.
 |
| Источник: © Донат Сорокин/ТАСС |
ФПИ создает достаточно сложную робототехническую платформу и обеспечивает разработку открытого контура управления платформой. У F.E.D.O.R. есть симулятор, библиотека программ управления его основным модулем, которую мы можем передать коллективам, разрабатывающим алгоритмы управления, чтобы они смогли портировать свои алгоритмы в уже существующую платформу. Для этого мы в нынешнем году совместно с Минобрнауки России объявили об открытии конкурса на лучшее решение для программирования антропоморфной платформы F.E.D.O.R.
F.E.D.O.R. - это не просто платформа для нас, это пилотный образец, который проходит ряд апробаций, испытаний для проверки возможности создания на его базе каких-то решений, о которых в начале проекта мы даже не говорили.
Стрельба с двух рук - это одно из таких решений. Интересна не сама стрельба, а алгоритмы управления. Когда робот берет в кисть пистолет, он действует как человек и последствия работы оружия будут теми же. Например, при нажатии на спусковой крючок пистолет так же отбрасывает в сторону. Как написать алгоритм, который помог бы точно оценить роботу эти искажения, возникающие при манипуляциях с оружием? Это очень нетривиальная задача.
Нашим коллегам из "Андроидной техники" с привлечением других организаций удалось решить эту проблему, после чего мы проверили результаты на полигоне. Рядом с роботом стоял подготовленный специалист из Федерации практической стрельбы, было дано классическое задание: стрельба на скорость по круговым мишеням. Да, у робота было два пистолета, но стрелял он ими как одним, и было очевидно, что у человека, мастера своего дела, просто не было шансов.
- Чему еще обучался F.E.D.O.R., если говорить о военной составляющей?
И.Денисов: Второе упражнение, которое выполнялось, стрельба по, условно говоря, опасным фигурам и тем, по которым стрелять нельзя. Здесь мы уже говорим об элементах технического зрения, когда машина не только отрабатывает механизмы наведения, но и анализирует изображение с точки зрения правильности применения оружия.
- Это можно назвать зачатками системы определения цели "свой-чужой"?
И.Денисов: Нет, это скорее алгоритмы технического зрения в области распознавания, когда он видит, есть ли у фигуры заданный признак или нет, а вот своя она или чужая, это уже более сложный вопрос, сегодня даже нет подходов к решению этой задачи. Робот пока просто распознает маркированную фигуру: одной формы - это своя, другой - чужая.
- Насколько оправданно создание человекоподобных роботов для военных целей?
И.Денисов: Сегодня робот - это, в основном, боевая система, усиливающая возможности человека. Если ключевая задача - сохранение жизни своим и поражение чужих, то без решения задачи "свой-чужой", без решения проблемы обдуманного решения о применении оружия, создание полноценного робота, будь он антропоморфный или нет, невозможно.
Сегодня боевые роботы - это машины, которые быстрее человека двигаются, управляют тяжелыми приводами, например, автоматами заряжания оружия в танках, которые умеют далеко видеть. Здесь не надо быть антропоморфным, здесь важны другие характеристики.
А.Кононов: В прессе были публикации о том, что к 2040 году в правоохранительной сфере роботы могут заменить людей, к 2030 году - на поле боя. К этим прогнозам надо относиться с осторожностью.
- Насколько наука продвинулась в вопросах создания искусственного интеллекта, позволяющего машинам принимать ключевые решения?
И.Денисов: Повторюсь, что сегодня интеллект машин позволяет решать им узкоспециализированные задачи. Эффективных алгоритмов, позволяющих машине самой себе ставить задачи и решать их, пока нет. Хотя работа в этом направлении ведется, в том числе, обучение на примере. Есть гражданские разработки, за которыми мы тоже наблюдаем, которые позволяют научить прибор изготавливать блюдо по рецепту, причем, рецепт показывается машине на экране, а не вводится в виде алгоритма. Но это все узкий сегмент.
Бой - это очень сложная задача. Это и движение в марше, и поиск, и обнаружение цели, ее идентификация, определение целесообразности нанесения удара противнику в данный момент. Сегодня говорить о самостоятельном применении роботами вооружений можно в каких-то исключительных случаях. Например, если речь идет о поражении атакующих ракет. Когда система находится в режиме уничтожения всех летящих целей в заданном секторе, в условиях, когда человек физически не способен принять решение. Тогда включается автомат, который рассчитывает момент и параметры поражения цели исходя из различных факторов: скорости ветра, окружающей обстановки, имеющихся на атакуемом предмете систем противодействия. Это достаточно сложный автономный аппарат.
Такие же автоматы можно применить в авиации в условиях суперперегрузок и скоростей, превышающих возможности человека. Они смогут рассчитать параметры отделения боеприпасов, наведения на цель, но опять же, цель всегда определяет человек. В ту же крылатую ракету с головкой самонаведения вводятся параметры полета, дальше она работает как робот, но выполняет волю человека, а не летит куда хочет.
- Есть опасность, что машины станут совершенными и выйдут из-под контроля человека?
И.Денисов: Сегодня это фантазии. Что будет завтра - можно поговорить потом. Надеюсь, у всех хватит ума и здравого смысла решить все задачи так, чтобы из-под контроля человека автоматы не выходили.

