Американские компании Liquid Robotics и Boeing провели испытания группы надводных роботов SHARC. Согласно сообщению Liquid Robotics, во время испытаний роботы должны были обнаруживать, а затем преследовать подводные лодки и автономные необитаемые подводные аппараты. С этой задачей SHARC справились полностью.
Существует множество способов поиска подводных лодок противника. В их числе - патрулирование с помощью собственных подлодок, облет водных пространств специальными патрульными самолетами с гидроакустическими буями и детекторами магнитных аномалий, а также развертывание гидроакустической сети постоянного наблюдения.
Сегодня военные активно интересуются возможностью использования роботов для поиска подводных лодок противника. Считается, что благодаря роботом выполнить эту задачу можно будет существенно быстрее и дешевле, задействовав при этом минимальное количество техники и людей. Морские роботы смогут достаточно эффективно отслеживать скрытное приближение субмарин, например, к военно-морским базам.
Во время испытаний новые роботы SHARC были объединены в группу из четырех. На аппараты установили высокочувствительные гидроакустические сенсоры компании Boeing. Роботы в полностью автономном режиме перемещались по морской поверхности и "прощупывали" воду в поисках подлодок.
Продолжительность патрулирования не уточняется. По данным Liquid Robotics за все время роботы отправили центру управления около ста автоматических отчетов. При этом аппараты смели обнаружить одного подводного робота и дизель-электрическую подводную лодку. Обнаружить подводного робота довольно сложно, поскольку он практически не издает шума и имеет небольшие размеры.
Обнаружить под водой дизель-электрическую подводную лодку еще сложнее, чем робота. Дело в том, что сам по себе этот корабль, перемещающийся в подводном положении с помощью электромоторов, практически бесшумен. Кроме того, экипаж может использовать различные маскировочные тактики. Например, ложиться на дно или укрываться в холодном слое воды, преломляющем акустические сигналы.
Испытания SHARC проводились во время масштабного британского учения Unmanned Warrior в октябре текущего года. В нем принимали участие около 50 беспилотных летательных аппаратов, надводных и подводных роботов. Эти аппараты занимались сбором разведывательной информации, поиском подводных лодок и мин, а также обеспечением связи.
Робот SHARC представляет собой составную конструкцию из надводной и подводной частей, связанных друг с другом кабель-тросом. В надводной части установлена мачта с лидаром и антенной для обеспечения связи, а также солнечные панели для питания электродвигателей и оборудования и подзарядки аккумуляторных батарей.
Подводная часть представляет собой вытянутый корпус с шестью подвижными подводными крыльями и хвостовым стабилизатором. В подводной части может быть установлена различная полезная нагрузка, включая гидроакустический сенсор. Последний оснащен длинной буксируемой антенной, существенно увеличивающей шансы обнаружения подводных объектов.
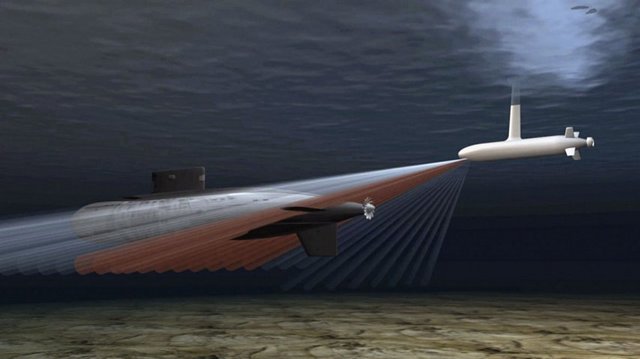 |
| Подводный беспилотный комплекс длительного слежения за подводными лодками противника - Anti-Submarine Warfare Continuous Trail Unmanned Vessel - ACTUV. Источник: Jane's International Defence Review |
Между тем, в США в настоящее время проводятся интенсивные испытания нового надводного робота "Си Хантер" проекта ACTUV, созданного специально для автономного патрулирования океана и поиска подводных лодок. Длина робота, выполненного по схеме тримарана, составляет около 40 метров. Он оснащен различным навигационным оборудованием и сонарами.
Василий Сычёв