
Инженеры из НАСА представили робота, конструкция которого образована стержнями, соединенными друг с другом при помощи приводов. Такой тип роботов может оказаться полезным в будущих миссиях на Титан и другие спутники планет. О своей разработке инженеры собираются рассказать в ходе Международной конференции по робототехнике и автоматике, а кратко об аппарате сообщает ресурс IEEE Spectrum.
Края стержней соединены прочными нитями, длину которых регулирует привод. Такая конструкция робота позволяет равномерно распределять нагрузки. Кроме того, аппарат способен легко менять форму, свободно перемещаться по пересеченной местности, а также упаковываться и распаковываться. Это позволяет сократить его размеры при транспортировке в дальнем космосе.
Конструкция робота предполагает настраиваемую жесткость. Это позволяет ему продолжить свою работу даже при механической деформации 75 процентов своих стержней. Что особенно актуально при сильных ударах о твердые поверхности и работе в условиях низкой гравитации, например на Титане — крупнейшем спутнике Сатурна (ускорение свободного падения там примерно в семь раз меньше земного).
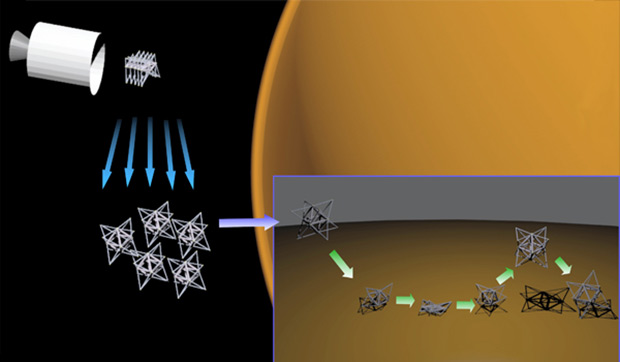 |
| Робот, конструкция которого образована стержнями (схема посадки) |
| Источник: NASA |
Инженеры представили несколько вариантов робота. На выставке они покажут аппарат SUPERball с 6 стержнями и 12 приводами. Окончательная версия робота будет содержать, как ожидается, 24 привода. Научное оборудование планируется размещать внутри стержней.
Конференция по робототехнике и автоматике пройдет с 26 по 30 мая в Сиэтле. На ней будут представлены, в том числе, и перспективные концепции для будущих исследований космоса и Земли.
