
Соревнования роботов Robotics Challenge, проводимые Управлением перспективных исследований и разработок министерства обороны США DARPA, обещают кардинальные перемены в возможностях систем и как они разработаны. Посмотрим на это событие и оценим мнение ряда ключевых игроков.
11 марта 2011 года в Японии произошло мощнейшее землетрясение с эпицентром примерно в 70 км от восточного побережья острова Хонсю. В результате землетрясения силой 9 баллов образовались волны, достигавшие высоты 40 метров и распространявшиеся вглубь острова на 10 км.
На пути опустошающего цунами стояла атомная электростанция Фукусима I. При ударе гигантских волн в станцию произошло катастрофическое разрушение реакторов. Это происшествие стало самой страшной ядерной трагедией со времени аварии на Чернобыльской АЭС в 1986 году. Это событие легло в основу сценария, пожалуй, одной из самых значительных программ по роботам на сегодняшний день – DRC (DARPA Robotics Challenge – практические испытания роботизированных систем по программе Управления перспективных исследований и разработок министерства обороны США).
Об испытаниях DRC было объявлено в апреле 2012 года, сценарием для этих испытаний было выбрано оказание помощи при стихийных бедствиях. Разработку новых систем необходимо было вести в рамках этого сценария, главным образом в связи с тем он входил в 10 ключевых миссий министерства обороны США, определенных Белым домом и министром обороны в январе 2012 года. В декабре 2013 года в рамках этих соревнований прошел важный этап, когда во Флориде первые были проведены первые «натурные» испытания.
DRC отличаются несколькими инновационными аспектами, в них совмещаются виртуальные и натурные испытания, они открыты для финансируемых и нефинансируемых команд. Это событие состоит из четырех так называемых секций или треков; DARPA предоставило финансовую поддержку для двух треков Track A и Track B и открыло эти соревнования для всех вновь прибывших.
Из четырех треков два (Track A и Track B) получили финансирование. После общего объявления и подачи документов на конкурс DARPA отобрало для Track A семь команд, которым была поставлена задача разработать новое аппаратное и программное обеспечение; в треке Track B 11 команд разрабатывали только программное обеспечение.
Track С не финансируется и открыт для новых участников со всего мира; как и участники трека Track В его участники прежде всего использовали виртуальную программу имитационного моделирования робота для тестирования своего программного обеспечения (ПО). Track D предназначен для зарубежных участников, которые желают разрабатывать «железо» и ПО, но без финансирования DARPA на любой стадии.
Ключом к инновационному подходу DRC стал компонент VRC (Virtual Robotics Challenge –виртуальные испытания роботизированных систем). Команды, занявшие в нем лучшие места – будь они из Track В или С – получат финансирование от DARPA, а также в свое пользование робота Atlas из Boston Dynamics, с которым примут участие в натурных испытаниях.
В мае 2013 года команды из Track В и Track С подали заявки на участие в квалификации для VRC, которая была проведена в следующем месяце. Из более чем 100 зарегистрировавшихся команд только 26 продолжили движение к VRC и всего 7 команд подошли к натурным испытаниям.
VRC проходили в высокоточном виртуальном пространстве, предоставленным по лицензии Apache 2 Фондом открытых программ. Командам была дана задача завершить три из восьми заданий, которые были определены для реальных роботов в первых натурных испытаниях.
Испытания
В то время как возможности роботов, продемонстрированные в VRC, были впечатляющими, в том, как они себя поведут в натурных испытаниях, не было стопроцентной уверенности; однако, программный директор конкурса DRC Джилл Пратт сообщил, что он был весьма удовлетворен их возможностями. «Мы ожидали, что поскольку это была первая физическая часть испытаний, мы могли увидеть множество поломок аппаратной части, но фактически это был не тот случай, всё железо было очень надежным. Несколько первых команд, особенно первые три, сумели получить более половины очков и совершили значительный прогресс даже тогда, когда мы специально создавали помехи в канале связи».
Пратт также был впечатлен возможностями робота Atlas, «Он действительно превзошел наши ожидания... Boston Dynamics провела образцовую работу для того, чтобы ни одна из команд не пострадала от какой-нибудь поломки аппаратной части».
Впрочем, есть еще возможности для совершенствования, это и руки-манипуляторы с ограниченным рабочим пространством и утечки из гидравлической системы робота. Процесс модернизации начался еще даже до мероприятия в декабре 2013 года. Пратт сказал, что он хотел бы также увеличить количество различных инструментов в финалах и роботы, скорее всего, будут иметь пояс с инструментами, из которого во время выполнения сценария им необходимо будет выбирать нужные инструменты и менять их.
Робота Atlas также похвалил научный сотрудник и программный инженер из флоридского Института когнитивных способностей человека и машин Даг Стивен, команда из которого в треке Track В заняла второе место в натурных испытаниях. «Это вполне замечательный робот... мы наработали с ним 200 часов чистого времени в течение двух или трех месяцев и это очень необычно для экспериментальной платформы – способность работать устойчиво и не ломаться».
За впечатляющими возможностями роботов в DRC стоят буквально героические усилия; задания придуманы так, чтобы быть особенно трудными и подвергнуть испытанию аппаратную и программную части, разработанные командами.
Хотя задачи и были трудными, Пратт не считает, что DARPA завысила планку слишком высоко, отметив, что каждое задание было выполнено, по крайней мере, одной из команд. Самыми трудными задачами были признаны вождение и соединение рукавов. По мнению Стивена первое было самым сложным: «Я бы сказал определенно – задача вождения автомобиля, и даже не из-за самого вождения. Если вы хотите получить полностью автономное вождение, что очень трудно, то вы всегда имеете робота-оператора. Вождение не было столь уж трудным, но выход из машины гораздо сложнее, чем люди могут это представить; это как решать большой трехмерный пазл».
В соответствии с форматом финалов DRC, которые должны пройти в декабре 2014 года, все задания будут объединены в один непрерывный сценарий. Всё это для того, чтобы сделать его более достоверным и дать командам стратегический выбор того, как его выполнять. Сложность также повысится, и Пратт добавил: «Наша задача для команд, отлично проявивших себя в Хомстеде, сделать его еще сложнее. Мы собираемся убрать привязные кабели, убрать кабели связи и заменить их беспроводной каналом, при этом мы собираемся ухудшить качество связи так, чтобы оно стало еще хуже, чем в предыдущих испытаниях».
«Мой план на данный момент состоит в том, чтобы сделать связь прерывистой, временами она должна будет полностью пропадать, и я считаю, что это надо делать в случайном порядке как происходит в реальных катастрофах. Посмотрим, что роботы могут сделать, работая несколько секунд, ну или может быть до минуты, пробуя выполнить некоторые подзадачи собственными силами, даже если ни полностью отрезаны от управления оператором и я думаю, это будет очень интересное зрелище».
Пратт сказал, что в финалах также будут убраны страховочные системы. «Это означает, что робот должен будет выдержать падение, это также означает, что он должен сам подняться и это реально будет довольно трудно».
Вызовы и стратегии
Из восьми команд во время испытаний пять использовали робота ATLAS, однако, участники трека Track A – победитель Team Schaft и третий призер Team Tartan Rescue – использовали свои разработки. Tartan Rescue «родом» из национального инженерного центра робототехники Университета Карнеги-Меллона (CMU), для испытаний в рамках DRC эта команда разработала высокоинтеллектуальную мобильную платформу CMU Highly Intelligent Mobile Platform (CHIMP). Тони Стентц из Tartan Rescue пояснил обоснование команды для разработки своей собственной системы: «Может быть и безопаснее использовать уже готового гуманоидного робота, но мы понимали, что можем создать лучшую конструкцию для реагирования на катастрофы».
 |
| Робот CHIMP – пытается прикрепить пожарный рукав к гидранту |
«Мы знали, что должны создать что-то приблизительно человеческой формы, но нам не нравилась в гуманоидных роботах необходимость сохранять равновесие при их передвижении. Когда двуногие роботы движутся, им необходимо держать равновесие чтобы не упасть и это достаточно сложно на плоской поверхности, но когда вы говорите о движении по строительному мусору и о наступании на предметы, которые могут двигаться, это становится еще более сложной задачей. Поэтому CHIMP статически стабилен, он опирается на довольно широкую базу и движении в вертикальном положении он катится на паре гусениц в своих ногах, поэтому он может ехать вперед-назад и поворачиваться на месте. Он достаточно легко позиционируется, чтобы выставить руки для переноса всего, что необходимо по заданию; когда ему нужно двигаться по более сложной местности он может упасть на все четыре конечности, поскольку на руках у него также имеются гусеничные движители».
Неизбежно, что команды из разных треков стояли перед разными проблемами при подготовке к испытаниям, Институт когнитивных способностей человека и машин сосредоточился на разработке ПО, ведь это самая сложная проблема – переход от VRC к натурным задачам. Стивен сказал, что «когда нам доставили робота Atlas, в нем было два «режима», которые вы могли использовать. Первый – простой набор движений, предоставленный компанией Boston Dynamics, который вы могли бы использовать для движения и который был немного недоработан. Оказалось, что большинство команд использовали эти встроенные режимы от Boston Dynamics во время конкурса в Хомстеде, очень мало команд написали свое собственное ПО управления роботом и никто не написали свое собственное ПО для всего робота...»
"Мы написали собственное ПО с нуля и это был контроллер всего тела, то есть это был один контроллер который работал во всех задачах, мы никогда не переключались на другие программы или на другой контроллер... Поэтому одной из самых сложных задач была создать программный код и запустить его на Atlas, поскольку это был своего рода черный ящик, когда Boston Dynamics представила его нам, но это их робот и их IP, поэтому мы реально не имели доступа к бортовому компьютеру на низком уровне. Наше ПО работает на внешнем компьютере и затем связывается с использованием API (интерфейс прикладного программирования) по оптоволокну с бортовым компьютером, поэтому возникают большие задержки и проблемы с синхронностью и здесь уже становиться довольно трудно контролировать такую сложную систему как Atlas».
Хотя написание своего собственного кода с нуля было конечно более сложным и трудоёмким для Института когнитивных способностей человека и машин Стивен считает, что такой подход выгоднее, так как при возникновении проблем их можно решить быстрее, чем полагаться на Boston Dynamics. Кроме того, ПО сопутствующее Atlas было не таким продвинутым как ПО которое Boston Dynamics использует в своих собственных демонстрациях «когда они посылали робота... они говорили довольно открыто, что движения не такие же, какие вы видите, когда Boston Dynamics выкладывает в Youtube видео робота, работающего на ПО этой компании. Это менее продвинутая версия... этого вполне достаточно для обучения робота. Я не знаю, собирались ли они дать код командам для пользования, я думаю ни ждали, что все напишут свое собственное ПО. То есть то, что было поставлено вместе с роботом возможно изначально и не предназначалось для выполнения всех восьми заданий на практических испытаниях DRC».
Для команды Tartan Rescue самой большой проблемой стал жесткий график, которого она должна была придерживаться при разработке новой платформы и соответствующего ПО. «Пятнадцать месяцев назад CHIMP был просто концепцией, чертежом на бумаге, поэтому мы должны были разработать детали, изготовить компоненты, все это собрать и всё протестировать. Мы знали, что это займет большую часть нашего времени, мы не могли ждать и не начинать писать ПО до тех пор, пока робот не будет готов, поэтому мы начали разработку ПО параллельно. Мы фактически не имели полноценного робота для работы, поэтому при разработке использовали симуляторы и аппаратные средства-заменители. Например, мы имели отдельную руку-манипулятор, которую могли использовать при проверке некоторых вещей для одиночной конечности», – пояснил Стентц.
Касаясь сложностей, которые добавит ухудшение каналов передачи данных, Стентц заметил, что это решение с самого начала принималось специально для подобных ситуаций и что это не очень сложная проблема. «У нас есть датчики установленные на голове робота – лазерные дальномеры и камеры – позволяющие нам построить полную 3-D текстурную карту и модель окружающей робота обстановки; это то, что мы используем со стороны оператора для управления роботом и мы можем представить это обстановку в разном разрешении в зависимости о доступной полосы частот и канала связи. Мы можем сосредоточить наше внимание и получить более высокое разрешение в некоторых зонах и пониженное в других зонах. У нас есть возможность дистанционно управлять роботом напрямую, но мы предпочитаем более высокий уровень контроля, когда мы определяем цели для робота и этот режим контроля более устойчив к потере сигнала и задержкам».
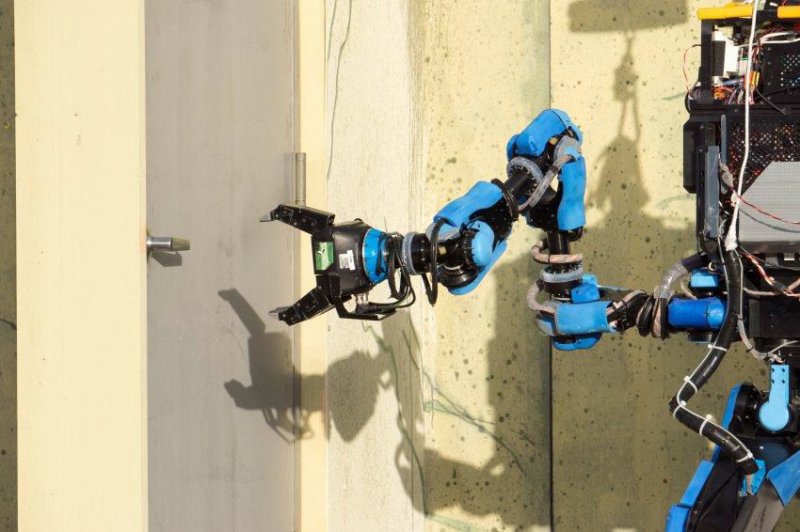 |
| Робот Schaft открывает дверь. Улучшенные манипуляционные возможности роботов будут обязательны для будущих систем |
Следующие шаги
Стентц и Стивен сказали, что их команды в настоящее время команды оценивают свои возможности в реальных испытаниях с тем, чтобы оценить какие действия необходимо предпринять, чтобы двигаться вперед, и что они ожидают заключения-отзыва из DARPA и дополнительной информации о том, что будет в финалах. Стивен сказал, что они также ожидают получения определенной модификации для Atlas, отметив одно уже утвержденное требование для финала – использование бортового блока питания. Для CHIMP это не проблема, поскольку робот с электроприводами уже может сам нести свои аккумуляторы.
Стентц и Стивен согласились, что существует ряд проблем, которые необходимо решить при развитии сферы роботизированных систем и создании типов платформ, которые могут использоваться в сценариях помощи при ликвидации последствий катастроф. «Я бы сказал, что в мире нет одной вещи, которая могла бы быть панацеей. Я полагаю касательно аппаратной части, что машины, имеющие более гибкие манипуляционные возможности, могут быть полезными. Что касается ПО, я считаю, что для роботов необходим больший уровень автономности, чтобы они без канала связи в дистанционных операциях могли действовать лучше; они могут выполнять задачи быстрее, поскольку делают многое сами и принимают больше решений в единицу времени. Я думаю, хорошая новость состоит в том, что соревнования под эгидой DARPA реально предназначены для продвижения обоих направлений, аппаратного и программного», – сказал Стентц.
Стивен считает, что усовершенствования процессов развития технологии также необходимы. «Как программист я вижу множество путей для совершенствования ПО и я также вижу много возможностей для усовершенствований в процессе работы над этими машинами. Много интересного происходит в лабораториях и университетах где может и не быть сильной культуры этого процесса, поэтому иногда работа идет бессистемно. Также, глядя на действительно интересные проекты на испытаниях DRC, понимаешь, что имеется много возможностей для усовершенствований аппаратной части и для инноваций».
Стивен отметил, что Atlas является главным примером того чего можно достичь – работоспособная система, разработанная за короткое время.
Для Пратта, однако, проблема более определена и он считает, что совершенствование ПО должно вестись в первую очередь. «Мысль, которую я пытаюсь донести, состоит в том, что основная часть ПО находится между ушами. Я имею в виду, что происходит в мозгу у оператора, что происходит в мозгу робота и как эти двое договариваются друг с другом. Мы хотим остановиться на аппаратной части робота и мы до сих пор имеем проблемы с ней, например, мы имеем проблемы со стоимостью производства, с эффективностью энергоснабжения… Несомненно самая тяжелая часть – это ПО; и это программный код для интерфейса робот-человек и программный код для самостоятельного выполнения задачи для самих роботов, который включает восприятие и ситуационную осведомленность, осознание того, что происходит в мире и выбор, основанный на том, что робот воспринимает».
Пратт считает, что поиск коммерческих приложений для роботов является ключом к разработке продвинутых систем и продвижению промышленности. «Я полагаю, нам действительно необходимы коммерческие приложения помимо ликвидации катастроф и общей оборонной сферы. Правда состоит в том, что рынки, оборонный, оперативного реагирования и ликвидации последствий катастроф, крошечные по сравнению с коммерческим рынком».
«Мы много любим рассуждать об этом в управлении DARPA, в качестве примера возьмем сотовые телефоны. DARPA финансировало многие разработки, которые привели к технологиям, использованным в сотовых телефонах... Если бы это был только оборонный рынок, для которого собственно сотовые и были предназначены, они бы стоили на много порядков больше чем сейчас, и это благодаря огромному коммерческому рынку, позволившему получить невероятную доступность сотовых телефонов...»
«В области робототехники наше мнение состоит в том, что нам нужна точно такая последовательность событий. Мы должны видеть коммерческий мир, покупающий приложения, который заставит цены падать, и после этого мы сможем создать системы специально для военных, в которые будут вложены инвестиции из коммерческой сферы».
В декабрьских испытаниях 2014 года примут участие восемь первых команд – Team Schaft, IHMC Robotics, Tartan Rescue, Team MIT, Robosimian, Team TRAClabs, WRECS и Team Trooper. Каждая получит по одному миллиону долларов для совершенствования своих решений и, в конечном счете, победившая команда получит приз 2 миллиона долларов, хотя для большинства признание намного ценнее деньги.
Виртуальный элемент
Включение DARPA двух треков в испытания DRC, в которых участвуют только команды-разработчики ПО, говорит о стремлении управления открыть программы возможно более широкому кругу участников. Прежде подобные программы технологической разработки были прерогативой оборонных компаний и исследовательских лабораторий. Впрочем, создание виртуального пространства, в котором каждая команда может тестировать свое ПО, позволило конкурсантам, которые не имели или имели мало опыта в разработке ПО для роботов, соревноваться на том же уровне, что и известные компании в этой области. DARPA также рассматривает моделируемое пространство в качестве долгосрочного наследия испытаний DRC.
В 2012 году Управление DARPA поручило Фонду открытого ПО разработать виртуальное пространство для соревнования Challenge и эта организация приступила к созданию открытой модели, используя программный пакет Gazebo. Gazebo способен моделировать роботов, сенсоры и объекты в трехмерном мире, он предназначен для обеспечения реалистичных данных от сенсоров и того, что описывается как «физически правдоподобные взаимодействия» между объектами.
Председатель Фонда открытого ПО Брайан Гёрки сказал, что Gazebo использовался благодаря своим проверенным возможностям. «Этот пакет достаточно широко используется в роботизированном сообществе, вот почему DARPA хотело сделать ставку на него, поскольку мы увидели его преимущества в том, что он делает; мы могли бы создать сообщество разработчиков и пользователей вокруг него».
Хотя Gazebo уже была известной системой, Гёрки заметил, что пока еще есть куда стремиться, должны быть сделаны шаги для удовлетворения требований, определенных DARPA. «Мы сделали очень мало для моделирования шагающих роботов, мы в основном делали акцент на колесных платформах и есть некоторые аспекты моделирования шагающих роботов, которые довольно сильно отличаются. Вы должны быть очень осторожны в том, как делаете контактное разрешение и как вы моделируете робота. Таким образом, вы можете получить хорошие параметры в обмен на точность. Много сил ушло на детальное моделирование физики робота, поэтому вы можете получить моделирование хорошего качества, а также получить работающего робота почти в реальном времени, в отличие от работа, работающего в одну десятую или одну сотую реального времени, что вполне вероятно, если бы не все те усилия, которые вы вложили в него».
Касаясь моделирования робота Atlas для виртуального пространства, Гёрки сказал, что Фонд должен был начать с базового комплекта данных. «Мы начали с модели, предоставленной Boston Dynamics, мы не начали с детальных моделей автоматизированного проектирования, у нас была упрощенная кинематическая модель, которую нам предоставили. В основном текстовый файл, в котором прописано какой длины эта нога, насколько она большая и так далее. Для нас трудность заключалась в правильной и точной корректировке этой модели так, чтобы мы могли получить компромисс рабочих параметров в обмен на точность. Если вы моделируете его упрощенно, то вы можете допустить некоторые неточности в лежащий в основе физический движок, что сделает его нестабильным в определенных ситуациях. Поэтому большая работа – это слегка изменить модель и в некоторых случаях написать свой код для моделирования определенных частей системы. Это не только моделирование простой физики, есть уровень, ниже которого мы не собираемся опускаться».
Пратт положительно воспринимает то, что было достигнуто с VRC и моделируемым пространством. «Мы сделали то, чего прежде не было, создали реалистичное технологическое моделирование с физической точки зрения, которое может быть запущено в реальном времени для того, чтобы оператор мог выполнять свою интерактивную работу. Это реально вам необходимо, поскольку мы говорим о человеке и роботе как об одной команде, поэтому моделирование робота должно работать в тех же временных рамках, что и человек, а это означает в реальном времени. Здесь в свою очередь необходим компромисс между точностью модели и ее стабильностью... Я считаю, что мы многого достигли в виртуальном соревновании».
Стивен пояснил, что при разработке ПО перед Институтом когнитивных способностей человека и машин IHMC стояли разные вызовы. «Мы использовали собственное условия моделирования, которые мы интегрировали с Gazebo как часть виртуального соревнования, но многое из наших разработок сделано на нашей платформе, названной Simulation Construction Set... мы использовали наше ПО, когда запускали реального робота, мы много работали над моделированием и это один из наших краеугольных камней, мы рассчитываем во многом на хороший опыт разработки ПО».
Стивен сказал, что в IHMC предпочитают использовать язык программирования Java, так как он имеет «действительно впечатляющий инструментальный комплекс, который вырос вокруг него». Он отметил, что при совмещении Gazebo и своего собственного ПО «главная проблема состоит в том, что мы пишем наше ПО на языке Java и большая часть ПО для роботов использует языки С или C++, которые очень хороши для встроенных систем. Но мы хотим делать работу на Java так, как этого мы хотим – заставить работать свой код в определенных временных рамках, как это реализовано в С или C++, но кроме нас его никто не использует. Это большая проблема заставить все программы Gazebo работать с нашим кодом на Java».
DARPA и Фонд открытого ПО продолжают разработку моделирующего и виртуального пространства и совершенствуют его. «Мы начинаем внедрять элементы, которые сделают симулятор более полезным в другой обстановке, вне места проведения аварийно-спасательных работ. Например, мы берем ПО, которое использовали в соревновании (названное CloudSim, поскольку он выполняет моделирование в «облачной» вычислительной среде) и разрабатываем его с намерением использовать на серверах облака», сказал Гёрки.
Одним из основных преимуществ обладания моделируемой средой, открытой для общего использования, и работы с ним в облачной среде, является то, что расчеты высокого уровня могут выполняться более мощными системами на серверах, тем самым, позволяя людям использовать свои легкие компьютеры и даже нетбуки и планшеты для работы на своем рабочем месте. Гёрки также считает, что этот подход будет очень полезным для обучения, а также при проектировании и разработке продукта. «Вы сможете получить доступ к этой моделирующей среде из любой точки мира и попробуете в ней своего нового робота».
Использованы материалы:
www.janes.com
www.darpa.mil
www.bostondynamics.com
Alex Alexeev
