Аннотация
Рассмотрена возможность самостабилизации гидросамолета в режиме экранного полета. Представлена принципиальная схема ГТД с компрессором на основе поперечно поточного нагнетателя. Плоская струя выхлопа используется для предотвращения срыва ламинарного обтекания профиля выполненного в виде широкого крыла.
Потребность в массовой скоростной перевозке грузов через океаны в настоящее время отсутствует. Не появится она, скорее всего, и в ближайшем будущем. Морские пассажирские перевозки гидроавиацией могут конкурировать с самолетными только в случае осуществления полноценного экранного полета с аэродинамическим качеством 35 -40. Для военного применения это требование желательно, но не обязательно. С точки зрения флота гидросамолет должен совершать многократные взлеты и посадки с минимальным расходом топлива, иметь системы дозаправки топливом с водоизмещающих судов или самолетов - танкеров, обладать возможностью занимать заданную позицию и находиться на ней длительное время в водоизмещающем режиме, атаковать намеченные подводные, надводные, береговые и воздушные цели вне зависимости от погодных условий и состояния водной поверхности.
На сегодняшний день соответствовать большинству подобных требований может самостабилизирующийся экраноплан категории С, т.е. экранолет. Пока гидросамолет не имеет достаточной продольной устойчивости в режиме экранного полета. Задача вполне очевидна – придать экранолету качества гидросамолета. Сами разработчики аппаратов пишут: «Дело в том, что сделать машину летающую не хуже хорошего самолета, с высокой устойчивостью наплаву и самостабилизирующуюся в режиме экранного полета никому еще не удавалось». Требования к экранолёту и гидросамолету для разных режимов полёта прямо противоположны: для экранолета нужно широкое крыло особого профиля и плоский широкий корпус, а для гидросамолета узкое крыло и узкий корпус.
Стремление решить эту проблему за счет разделения несущей поверхности на две части (широкую и узкую ) просматривается в проекте экранолёта «С-90», ОКБ Сухого. Согласно проекту (рис.1), аппарат представляет собой гибридное транспортное средство с тремя режимами движения: парение на воздушной подушке, полёт на низкой высоте (в котором и должен проявляться эффект «экрана»), полёт на высотах до 4000м. Несущие поверхности разнесены по горизонтали, а вертикальное совмещение имеют лишь в точках сопряжения. Подобная схема предполагает повышенную устойчивость и облегчение проблем балансировки. ЛА с таким «ромб-крылом» могут маневрировать без изменения углового положения самолета, без запаздывания и с меньшим аэродинамическим сопротивлением, возникающим в процессе маневра. Была доказана возможность повышения аэродинамического качества за счет снижения интенсивности концевых вихрей.
 |
| Рис1. Проект экранолета С-90. |
| Источник: Подзирей Ю.С. |
При всех преимуществах такой схемы ее основной недостаток - недостаточная курсовая устойчивость на малых скоростях и восприимчивость к боковым порывам ветра при которых могут возникнуть взаимосвязанные колебания крена и рыскания. Это наиболее опасно для экранного режима полета. Полет на экране требует особо устойчивого и управляемого полета.
Подобного недостатка лишено обычное прямое крыло, которое по суммарным качествам признано лучшим для ЛА с дозвуковыми скоростями. Придать широкому крылу свойства узкого можно за счет управления пограничным слоем. Идея управления пограничным слоем с целью предотвращения срыва ламинарного обтекания профиля крыла с помощью двигателя имеет место на всем протяжении развития авиации. Наиболее четко использование эта тенденция просматривается в ряде конструкций связанных со схемой «летающее крыло». В экраноплане ЭКИП ламинарное обтекание профиля осуществляют специальные вихревые ячейки, а для экранного полета используются вспомогательные двигатели. Патент 2033945 RU «Летательный аппарат, система управления отсосом пограничного слоя, система управления вдувом в пограничный слой, устройство фиксации положения схода потока с задней кромки фюзеляжа и его взлетно-посадочное устройство на воздушной подушке ».
ЭКИП позволяет осуществлять движение не только в приземном режиме, но и в режиме свободного полета с высоким аэродинамическим качеством; взлет и посадку с неподготовленных аэродромов и с воды. Основным режимом его движения является свободный полет.
Недостаток подобной схемы - это небольшое удаление плоскостей управления от центра масс, что обусловливает их низкую эффективность и делает ЛА неустойчивым — рыскливым — в полёте. Строго говоря, «ЭКИП» не является полноценным экранолётом, поскольку полёт на низкой высоте проводится с использованием посадочного движителя (как и у «С-90») и в основном в режиме взлета - посадки.
Помимо вихревых ячеек известны и другие способы активного управления пограничным слоем. Например, отбор воздуха с верхней поверхности крыла через отверстия, которые соединены каналом с компрессором или вентилятором газотурбинного двигателя и образуют входное сечение воздухозаборника двигателя (патент 2240957 RU «Способ увеличения подъемной силы крыла»). Отверстия могут иметь форму щели и расположены в несколько рядов по поверхности крыла, а в качестве газотурбинного двигателя может быть использован двухконтурный турбореактивный двигатель. Воздух отбирают более чем с 20% верхней поверхности крыла. Захватить большую ширину крыла двигатель с осевым компрессором не способен. Технический результат – повышение подъемной силы и улучшение аэродинамических характеристик крыла.
 |
| Рис.2. Схема интеграции поперечно поточного нагнетателя (ППН) с несущим элементом: а) интеграция движителя с профилем; б) самолет укороченного взлета и посадки. |
| Источник: Подзирей Ю.С. |
Попытка осуществить обдув крыла (на все 100%) за счет движителя приведена в работе (Коровкин А.Г., Савчук В.Д., Долгополов А.А. Новые области применения диаметральных вентиляторов. [Текст] // Полет 2002 №4 с.51-57) рис.2. Сам двигатель располагается в фюзеляже.
Устранить подобный недостаток можно с использованием двигателя встроенного в крыло и имеющего отличную от общепринятой геометрию. На рис. 3 представлена принципиальная схема такого двигателя (патент 101310 UA »Газотурбинный двигатель»). Двигатель состоит из картера в виде воздуховода с коленами, число которых определяется числом ступеней компрессора. Двигатель содержит также щелевой прямоугольный воздухозаборник 7; роторы 4, 6 ( и другие не отмеченные на рис.) соединенные между собой и с газовой турбиной 2 трансмиссией 10; регулятор тяги 9, камеру сгорания 3, сопло 1, вал отбора мощности 11 и расходный топливный бак 5. Двигатель работает следующим образом. Атмосферный воздух через воздухозаборник 7 (рис.3) попадает на лопатки ротора 6. Первая ступень компрессора должна обеспечить максимальный коэффициент производительности (φ), а последующие максимальный коэффициент повышения давления (ψ). Поворот воздуха после каждой ступени на угол более 90 градусов, позволяет отказаться от статорных лопаток, сократить один из габаритных размеров, а также вес и стоимость двигателя. Вследствие смещения основного вихря относительно центра ротора каждая лопатка работает дважды. Сначала загоняя воздух в центр ротора за счет центростремительной силы, а затем выбрасывая его за счет центробежной. Трансмиссия 10 в виде комбинации шестерен и зубчатой ленты, позволяет вращать каждый ротор с заданной скоростью и оптимизировать процесс сжатия воздуха. Тяга двигателя регулируется «языком» 9. По предварительной оценке удельный вес двигателя занимает промежуточное положение между обычным и подъемным ГТД. Мощный компрессор на основе шести ступеней, по своим параметрам сопоставим с обычным двенадцатиступенчатым осевым компрессором. Суммарная степень сжатия может быть доведена до 35-40 ед. Смещение воздухозаборника 7 от носка профиля снижает вероятность попадания забортной воды в двигатель на взлетном режиме, а откачка пограничного слоя воздуха с носка профиля и сдув турбулентности после сопла ламинизирует обтекающий крыло поток, что увеличивает подъемную силу крыла.
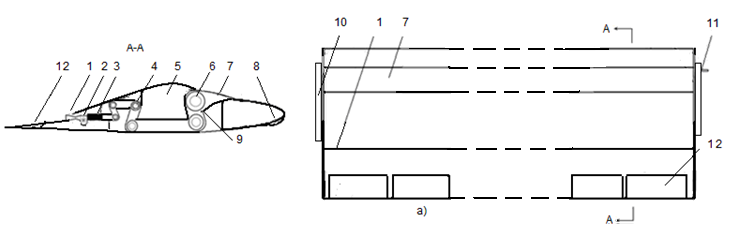 |
| Рис.3. Схема ГТД с шестиступенчатым компрессором на основе поперечно поточного нагнетателя: 1 - сопло, 2 - турбина полуоткрытого типа, 3 - камера сгорания , 4,6 - роторы ППН , 5 - расходный топливный бак, 7 - щелевой воздухозаборник, 8 - предкрылок, 9 - язык, 10 - трансмиссия, 11 - вал отбора мощности для электрогенератора. 12- выдвижной закрылок. |
| Источник: Подзирей Ю.С. |
Специфическими особенностями двигателя являются:
1. Отсутствие статорных неподвижных лопаток и осевых втулок, размещенных в центре потока воздуха.
2. Конфигурация поперечного сечения сопла, допускающая возможность получения плоской протяженной газовой струи без гидродинамических потерь.
3. Простота и надежность управления тягой двигателя за счет перемещения «языка»9 или короткой заслонки на воздухозаборнике (на фиг.3 не показаны).
4. Уменьшенный габарит двигателя по длине, обусловленный конфигурацией воздуховода и отсутствием статорных лопаток.
5. Простота и доступность обслуживания трансмиссии и редуктора, шестеренчатые и ременно-зубчатые передачи которой расположены на торцах двигателя вне картера.
6. Возможность конструктивного наращивания тяги двигателя за счет увеличения длины щелевого воздухозаборника 7 при сохранении других габаритов.
7. Возможность оптимизации процесса сжатия воздуха за счет вращения роторов ступеней с различными скоростями, а также его охлаждения за счет теплообмена с топливом.
Схема профиля, представленная на рис. 3, может быть использована для обычного самолета укороченного взлета и посадки. Она увеличивает хорду крыла по сравнению со схемой представленной на рис.2, и обеспечивает ламинарное обтекание Плоская струя после выхлопа имеет большие теплопотери, что снижает видимость транспортного средства в инфракрасном диапазоне.
По предварительным оценкам удельный вес такого двигателя занимает промежуточное положение между обычным и подъемным ГТД. Обусловлено это отсутствием осевой втулки (или барабана) и тормозных спрямляющих лопаток, двукратным использованием каждой лопатки, включением лопаток в кинематическую схему трансмиссии выполненной на основе шестерен и зубчатого ремня между третей, второй и первой ступенями компрессора. Расположение роторов (в два уровня) позволяет сократить длину двигателя и выполнить его картер в виде крыльевого профиля с предкрылками 8. Блоки трансмиссии 10, топливный бак 5 и ступенчатый воздуховод вместе создают жесткую конструкцию корпуса. Тепловой контакт топлива в баке 5 с картером позволяет охлаждать сжимаемый воздух, что дополнительно повышает эффективность работы компрессора. Полученная в результате такого теплообмена энергия попадает в камеру сгорания в виде нагретого топлива.
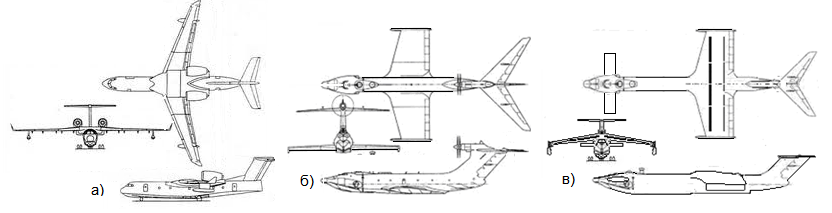 |
| Рис.5. Схема ЛА а) гидросамолет Бе-200; б) экраноплан проекта 904 «Орленок»; в)- самостабилизирующийся гидросамолет –экраноплан (проект). |
| Источник: Подзирей Ю.С. |
На рис. 5 а,б,в представлены общие схемы амфибийных транспортных средств. Бе-200 (рис. 5а), представляет собой моноплан с высокорасположенным стреловидным крылом, Т-образным хвостовым оперением и лодкой большого удлинения с переменной поперечной килеватостью. Особенностью Бе-200 по сравнению с другими самолетами-амфибиями является полностью герметичный фюзеляж, что позволяет использовать этот самолет для выполнения широкого круга задач. Силовая установка базового варианта включает в себя два двухконтурных турбореактивных двигателя Д-436ТП, которые установлены над корневой частью крыла для защиты двигателей от воды во время взлета и посадки Самолёт-амфибия Бе-200 может эксплуатироваться с аэродромов класса "В" (длина ВПП - 1800 м), а также с моря, рек и озёр при глубине не менее 3 м и при высоте волны до 1,2 м (3 балла). Основным недостатком гидросамолета Бе-200 является неспособность его к самостабилизации в процессе экранного полета и значительные ограничения на взлет и посадку по волнению водной поверхности, обусловленные значительным размахом крыла.
Транспортно-десантный экраноплан проект 904 «Орлёнок» (рис. 5б) построен по самолётной схеме. Это трёхдвигательный низкоплан с Т-образным хвостовым оперением и корпусом-лодкой. Крыло имеет аэродинамическую компоновку, оптимизиро¬ванную для движения вблизи экрана. Оптимальная высота полета около 2 м. При необходимости аппарат способен уходить с экрана и лететь подобно самолёту, на высотах до 6 км. Стабилизатор, вынесенный за пределы действия экрана высотой порядка 16 м, не имеет достаточной прочности, а закрепленный на нем высоко расположенный двигатель представляет удобную мишень. При высоте полета порядка САХ крыла возможные крены очень малы, а радиусы поворотов слишком велики. Автономность по запасам провизии и топлива - 1 сутки. Транспортный экраноплан отличался неплохой манёвренностью в водоизмещающем режиме ( радиус циркуляции не превышает 60 м), но для частой реализации режима взлет-посадка требуется повышенный расход топлива. В полёте, при выполнении координированного разворота путём отклонения руля направления и элеронов, его радиус около 3000 м. Оценка весовой отдачи «Орлёнка» по полезной нагрузке (коммерческая нагрузка, топливо и экипаж) показывает, что она не превышает 27%, что для транспортного средства недостаточно. Максимальное значение аэродинамического качества при отрыве от экрана становится заметно меньше, что прямо влияет на дальность полёта. Очевидно, что для контроля за кораблями и подводными лодками в океане, а также высадки десанта на удаленное побережье (например, пляж штата Майами) такой экраноплан не пригоден.
На рис. 5в представлен проект гидросамолета амфибии, выполненного по схеме "утка", с качеством самостабилизации в процессе экранного полета. Условия самостабилизации ЛА подобной схемы рассмотрены в работе »Самостабилизирующийся экраноплан» (патент РФ № 2224671). ЛА содержит фюзеляж, в виде лодки большого удлинения, в передней части которой установлено прямоугольной формы в плане горизонтальное оперение (ПГО), а в кормовой части фюзеляжа - крыло малого удлинения и вертикальное оперение с рулем направления, Два двигателя с осевыми компрессорами установлены в фюзеляже с возможностью поворота сопла относительно горизонтальной оси и отбора части сжатого компрессором воздуха для обдува ПГО. Крыло малого удлинения типа обратное V интегрировано с четырех секционным двигателем, принципиальная схема которого рассмотрена выше. Его картер образует частично профиль крыла, которое имеет выдвижные закрылки. В убранном состоянии они позволяют снизить потери на обдувку в режиме свободного и экранного полета, а в выдвинутом состоянии снизить расходы топлива на взлет. Уменьшение взлетной и посадочной скорости позволит снизить требования к волнению моря при взлете и посадке, а снижение веса конструкции, за счет хвостового стабилизатора и силовой установки, повысить автономность данного транспортного средства.
Подзирей Ю.С.
12.03.14. Киев


