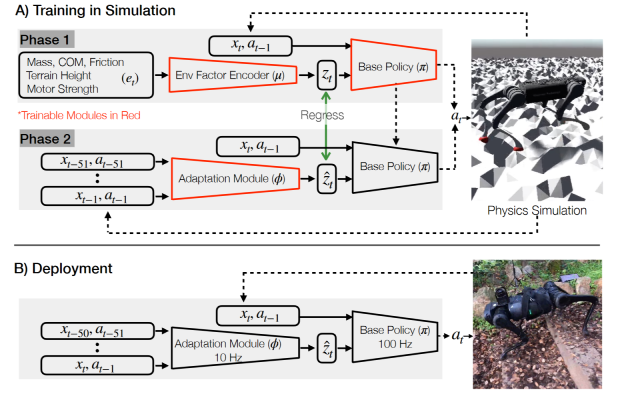
Схема обучения и работы алгоритма.
- Источник
- Ashish Kumar et al., 2021
- Размер
- 620 x 398
- Вес
- ~149 kb
- Загружено
- 14.07.2021
- Загрузил
- ДВ
Код для вставки
Код для вставки миниатюры
Код для вставки миниатюры
Американские инженеры разработали алгоритм управления четвероногим роботом, позволяющий ему моментально вслепую, без визуальных датчиков, адаптироваться к изменению рельефа или внешним нагрузкам, и при этом полностью основанный на машинном обучении.

