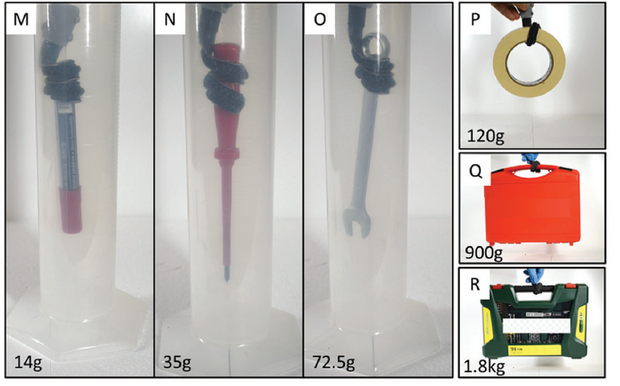
Захват удерживает предметы различной формы и веса.
- Источник
- T. T. Hoang et al. / Advanced Materials Technologies, 2020
- Размер
- 620 x 386
- Вес
- ~415 kb
Код для вставки
Код для вставки миниатюры
Код для вставки миниатюры
Инженеры из Австралии разработали биомиметический мягкий манипулятор для роботов, который способен захватывать предметы, обвиваясь вокруг них наподобие щупальца осьминога или хобота слона. Манипулятор сделан из ткани и приводится в действие гидравлическим актуатором.

